-

 EntretienUne minute avec Alessia Del Grossovideo00:01:56
EntretienUne minute avec Alessia Del Grossovideo00:01:56- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
-
 ConférenceQuantum feedback engineering, bosonic codes and quantum error correction, by Pierre Rouchon…video01:10:58
ConférenceQuantum feedback engineering, bosonic codes and quantum error correction, by Pierre Rouchon…video01:10:58- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
-
 video00:19:33
video00:19:33- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3


Inria - Institut national de recherche en sciences et technologies du numérique
Nos dernières publications

Désassemblons le numérique #E15 - Demain, des avions aussi silencieux que des oiseaux ?
Dans ce nouvel épisode de Désassemblons le numérique, nous vous invitons à prendre... un peu d'altitude ! Fermez les yeux et imaginez : un avion qui décolle sans fracas, qui traverse le ciel sans
Une minute avec Alessia Del Grosso
Rencontre avec Alessia Del Grosso, chercheuse ISFP (Inria Starting Faculty Position) au sein de l’équipe-projet Memphis du Centre Inria de l’université de Bordeaux.
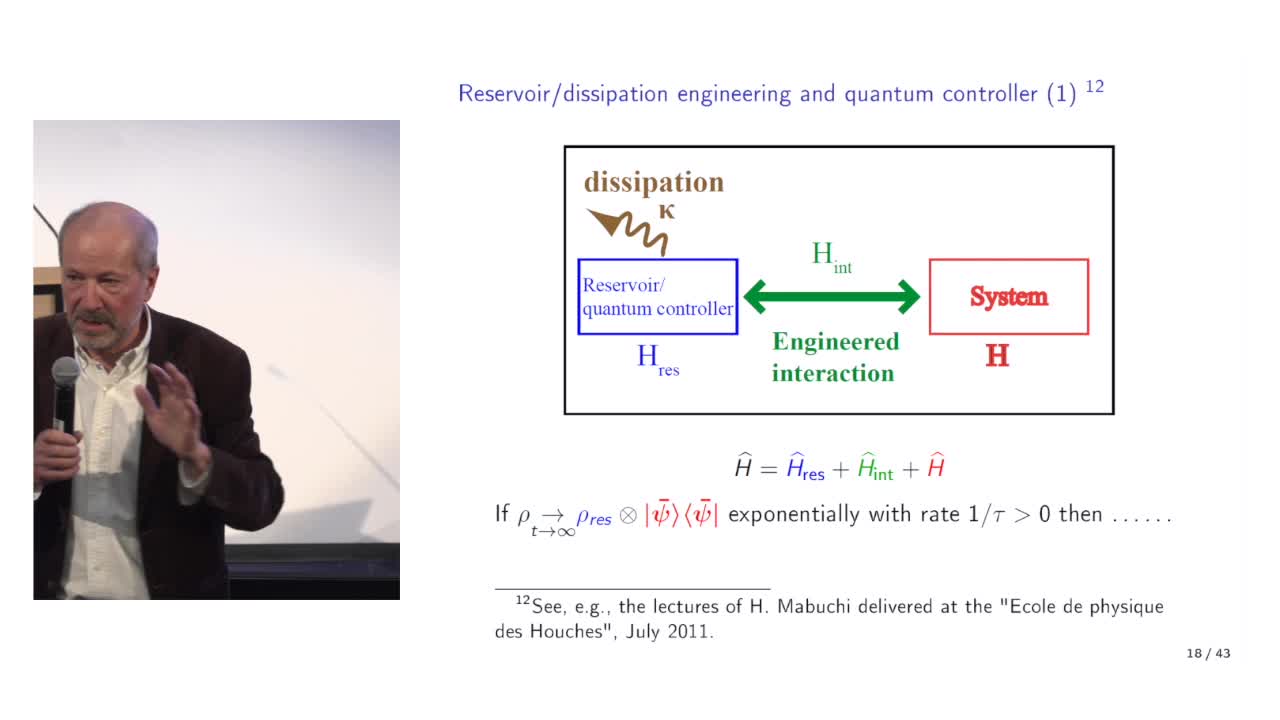
Quantum feedback engineering, bosonic codes and quantum error correction, by Pierre Rouchon (Mines …
Quantum error correction relies on a feedback loop. This feedback generally corresponds to a classical controller. Quantum error correction can also exploit the dissipation associated with the
Désassemblons le numérique - #Episode14 : Et si demain, l'IA lisait dans nos pensées ?
Dans ce nouvel épisode de Désassemblons le numérique, nous vous proposons un petit détour par… votre cerveau ! Enfin, plus précisément, par la façon dont les machines pourraient un jour le comprendre.

Une minute avec Michel Bergmann
Rencontre avec Michel Bergmann, directeur de recherche au sein de l’équipe Memphis, du Centre Inria de l'université de Bordeaux.

Risk and Return in Scientific Research
Intervention de Pierre Azoulay, lors des premières Rencontres du Programme Inria Quadrant qui ont eu lieu le 18 juin 2025, au Grand Amphithéâtre de l'Université Paris Cité.

High Risk High Reward Research Funding: Can We Learn from the US System?
Intervention de Martin Vetterli, lors des premières Rencontres du Programme Inria Quadrant qui ont eu lieu le 18 juin 2025, au Grand Amphithéatre de l'Université Paris Cité.

Une minute avec Corinne Duchêne
Rencontre avec Corinne Duchêne, gestionnaire au sein du service mutualisé de gestion des ressources humaines pour le Centre Inria de l’université de Bordeaux et le siège d’Inria.
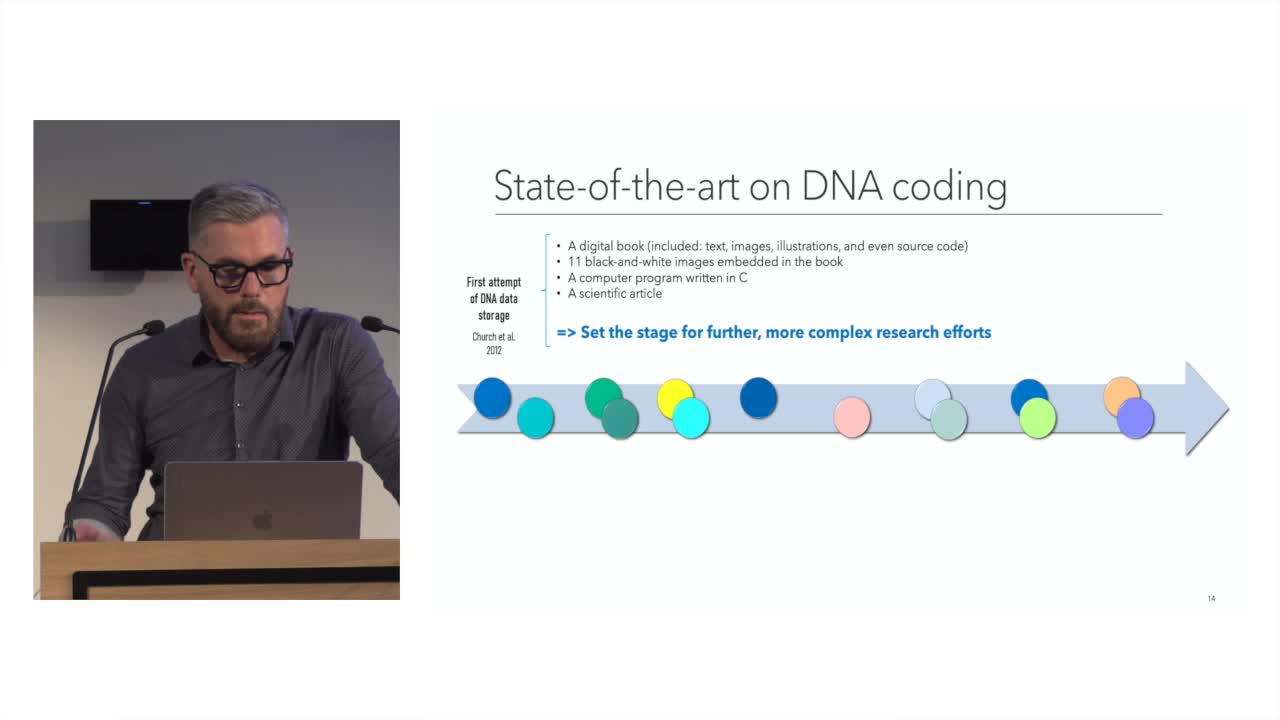
Storing Digital Data on Synthetic DNA: State of the Art and Open Challenges
The amount of digital data generated worldwide is continuously growing at an unprecedented rate: 90% of all existing data has been created in the last two years alone.

Une minute avec François Clautiaux
Rencontre avec François Clautiaux, responsable de l'équipe-projet Edge du Centre Inria de l'université de Bordeaux.

Webinaire « Retour d’expérience » de scientifiques « chiche » d’aller dans les classes – RDV du 17 …
Webinaire « Retour d’expérience » de scientifiques « chiche » d’aller dans les classes – RDV du 17 juin 2025

Webinaire « Retour d’expérience » de scientifiques « chiche » d’aller dans les classes – RDV du 17 …
Webinaire « Retour d’expérience » de scientifiques « chiche » d’aller dans les classes – RDV du 17 octobre 2024.
Intervenants et intervenantes

Docteur en informatique (Paris 11, 1985)
Directeur de recherches à l'Inria et à l'ENS Paris, membre du collège de l'Arcep (en 2022)
Professeur au Collège de France (2011-2012) du cours "Sciences des données : de la logique du premier ordre à la Toile" dans le cadre de la chaire annuelle "Informatique et sciences numériques"
Doctorat de mécanique ; directeur de thèse en Automatique et productique à Grenoble Alpes en 2015

enseignant chercheur au Département d'Informatique de l'Université de Reykjavik en 2011

Titulaire d'un doctorat en Informatique (Oxford Brookes University, 2010)
Rapporteur et membre du jury d'une thèse en Informatique à Université Côte d'Azur en 2024
Chargé de recherche au sein de l'équipe "Thoth project" de l'Inria Grenoble - Rhône-Alpes
Rapporteur lors d'une thèse soutenue à l'INSA Lyon en 2024
Ph. D. (Université de Cambridge, 1977)
Mathématicien. En poste au Department of statistics, University of California, Berkeley, California, USA (en 1985)
Informaticien. Chargé de recherche HDR INRIA, équipe Compilation et analyse, logiciel et matériel (CASH), Laboratoire de l'informatique du parallélisme (LIP, UMR5668 / URA1398), École normale supérieure, Lyon (2025)
Titulaire d'un doctorat de Mathématiques et Informatique, spécialité : Informatique, Bordeaux 1 (en 2007). - Maître de conférences, Université de Lorraine, LORIA (en 2018). - Professeur en informatique, Université de Lorraine (en 2024)
Professeur à la faculté EECS (Electrical Engineering and Computer Science) de l'Université de Berkeley (2019)
Chercheur en Informatique
Auteur d'une thèse en Sciences de l'ingénieur à Nice en 1991
Habilitation à diriger des recherches, université de Nice-Sophia Antipolis (2003)
Directeur de recherche au CNRS, laboratoire I3S, université de Nice-Sophia Antipolis (en 2016). Directeur de recherche CNRS, membre du Laboratoire d'Informatique Signaux et Systèmes de Sophia Antipolis (I3S), Université Côte d'Azur (en 2023)
Membre du jury lors d'une thèse soutenue à l'INSA Lyon en 2023
Directeur de thèse, université de Nice-Sophia Antipolis