5.1. Introduction
Vasquez Govea
Alejandro Dizan
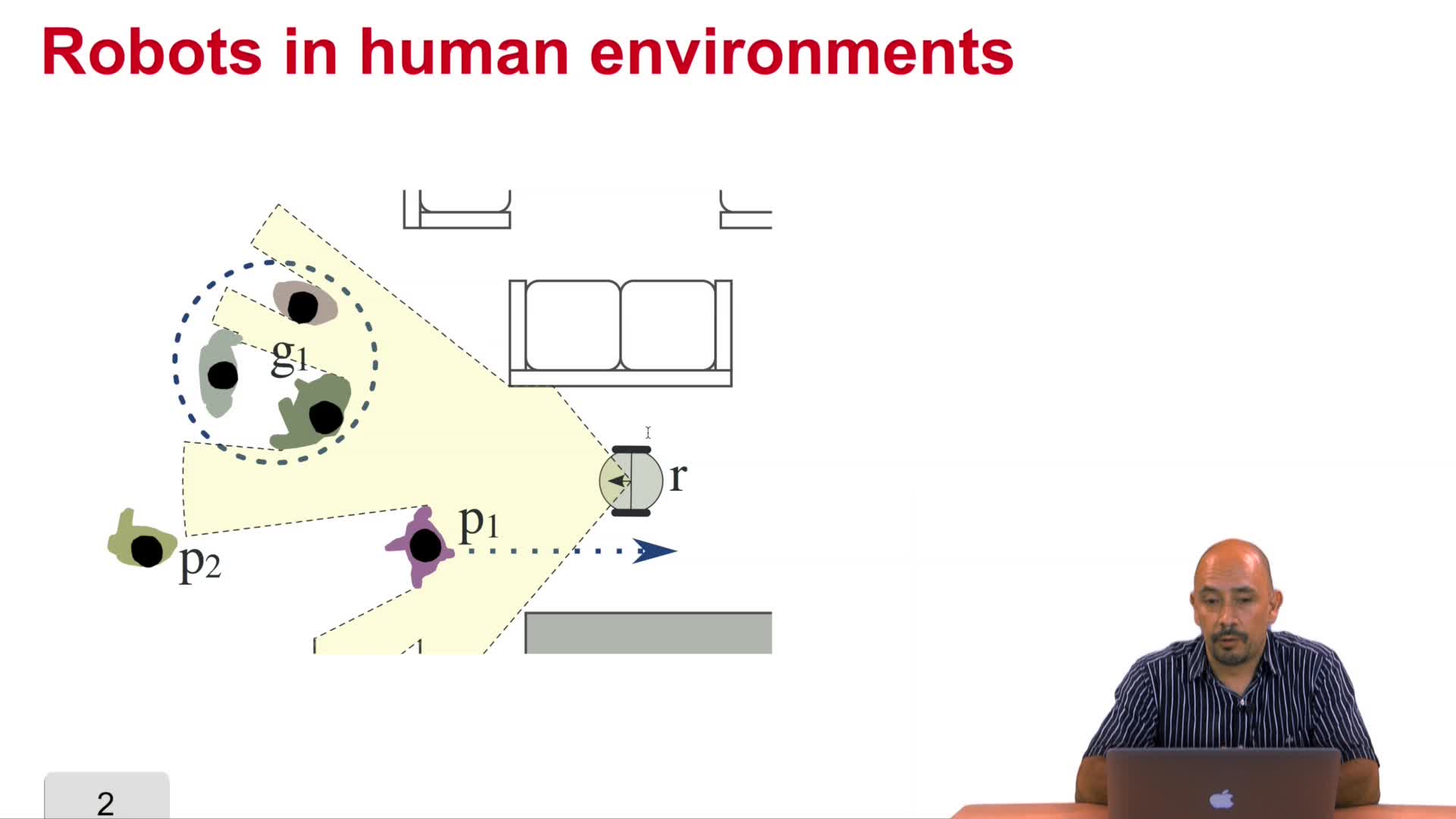
In this part of the course we are going to go deeper into situation awareness and in particular we are going to study how to model and learn human behavior which is a crucial task for social-aware