Les capteurs THOË et TRACESENSE
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
Mon compte
Pas encore inscrit ?
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
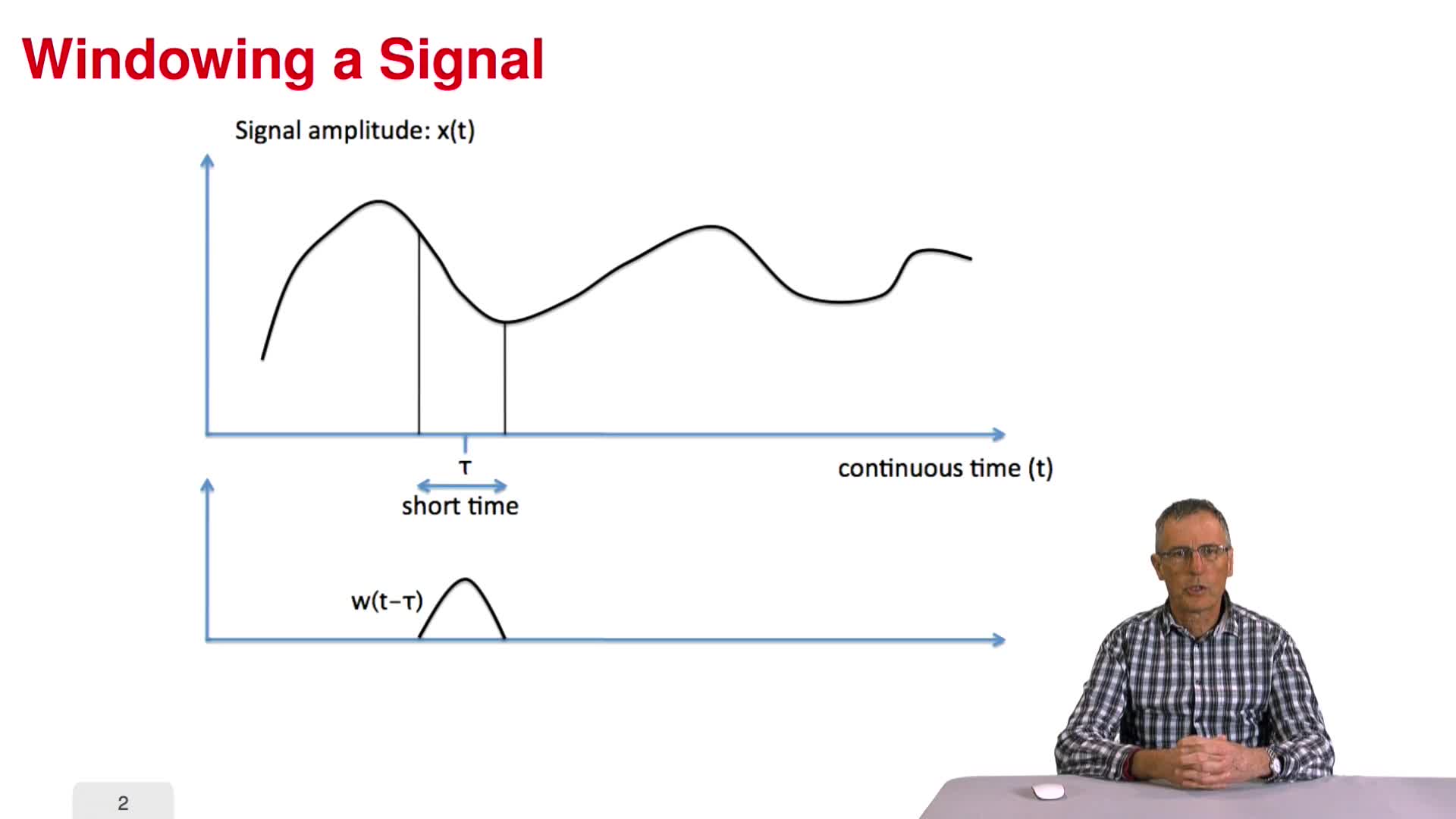
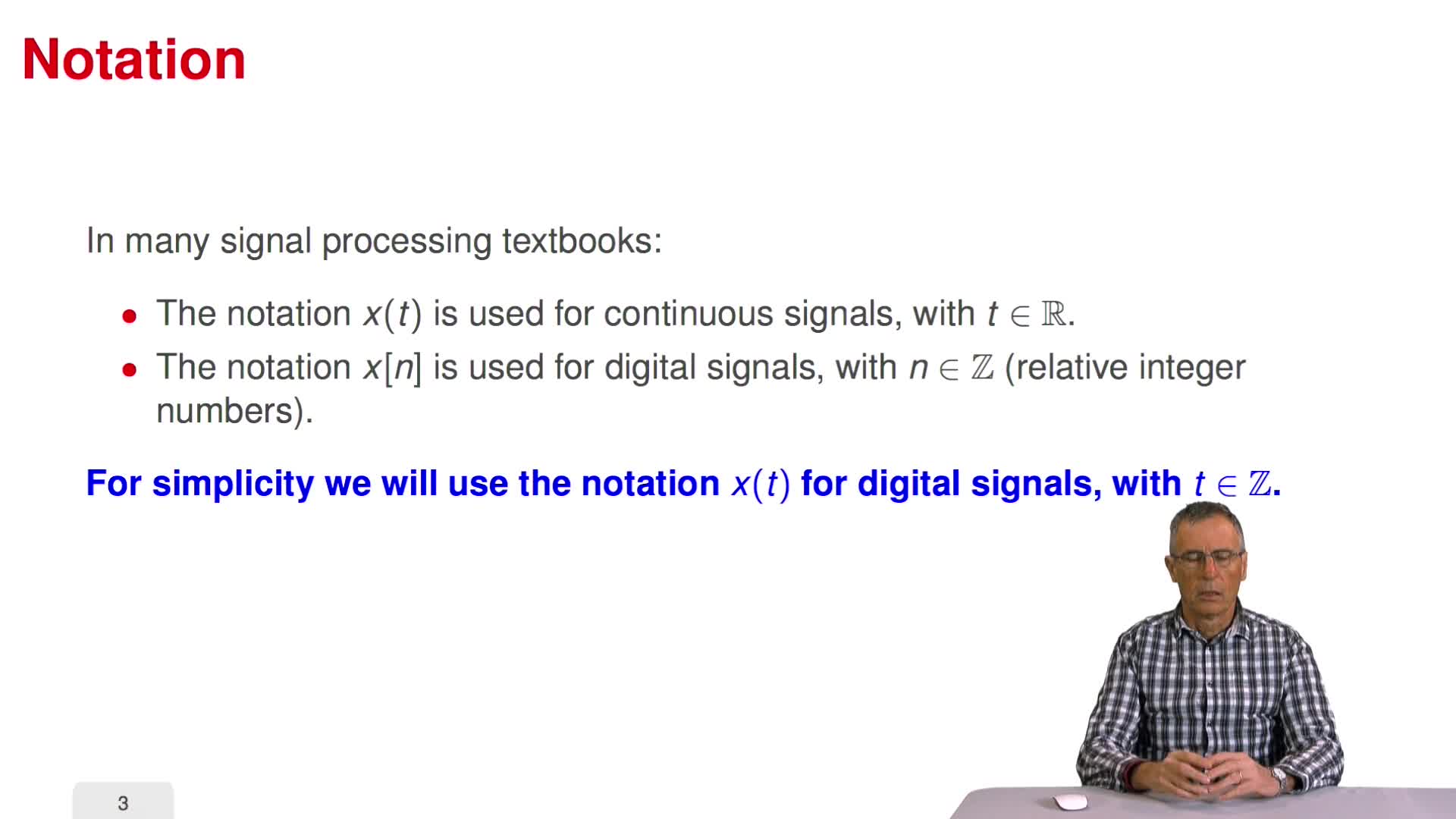
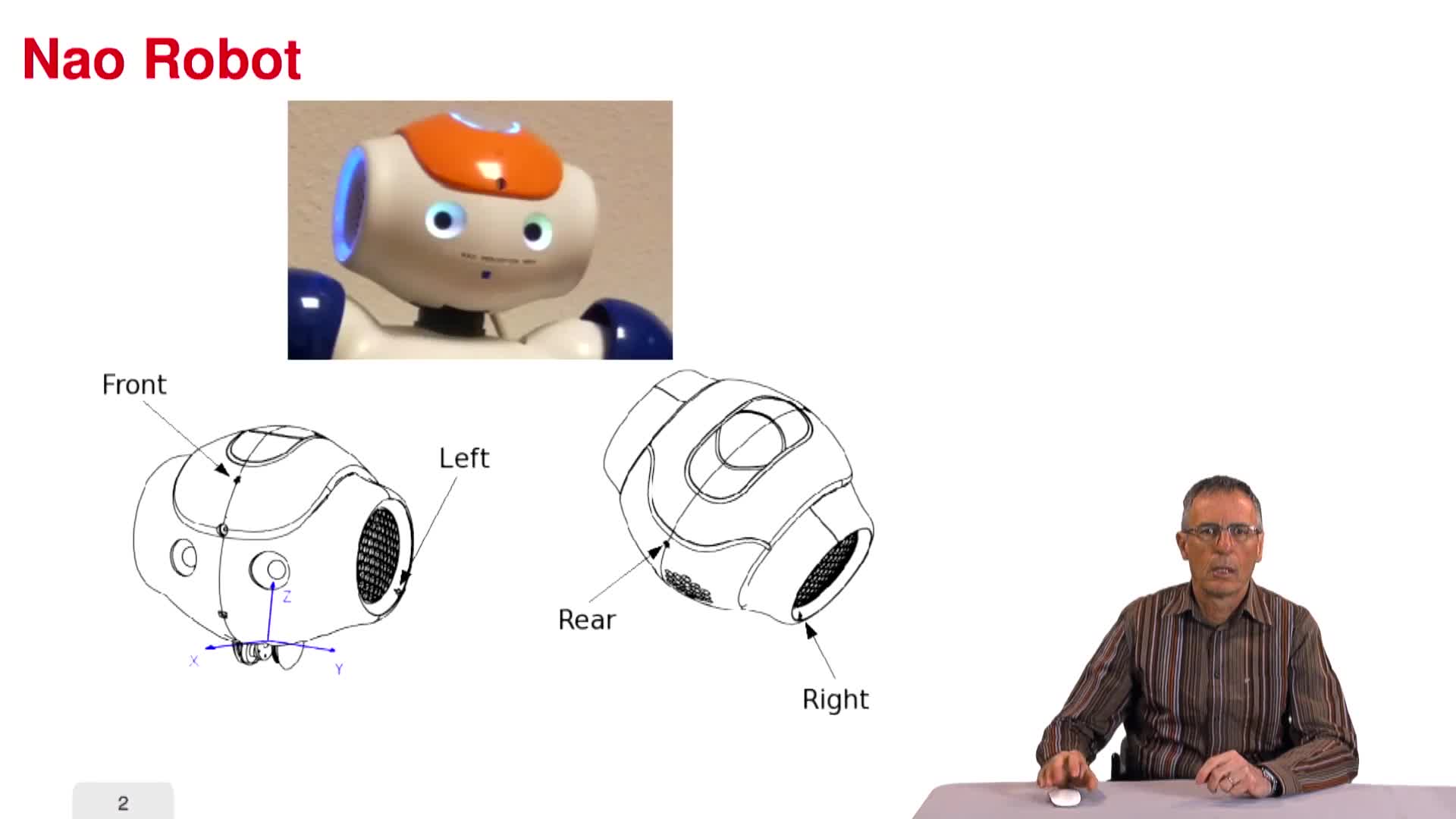
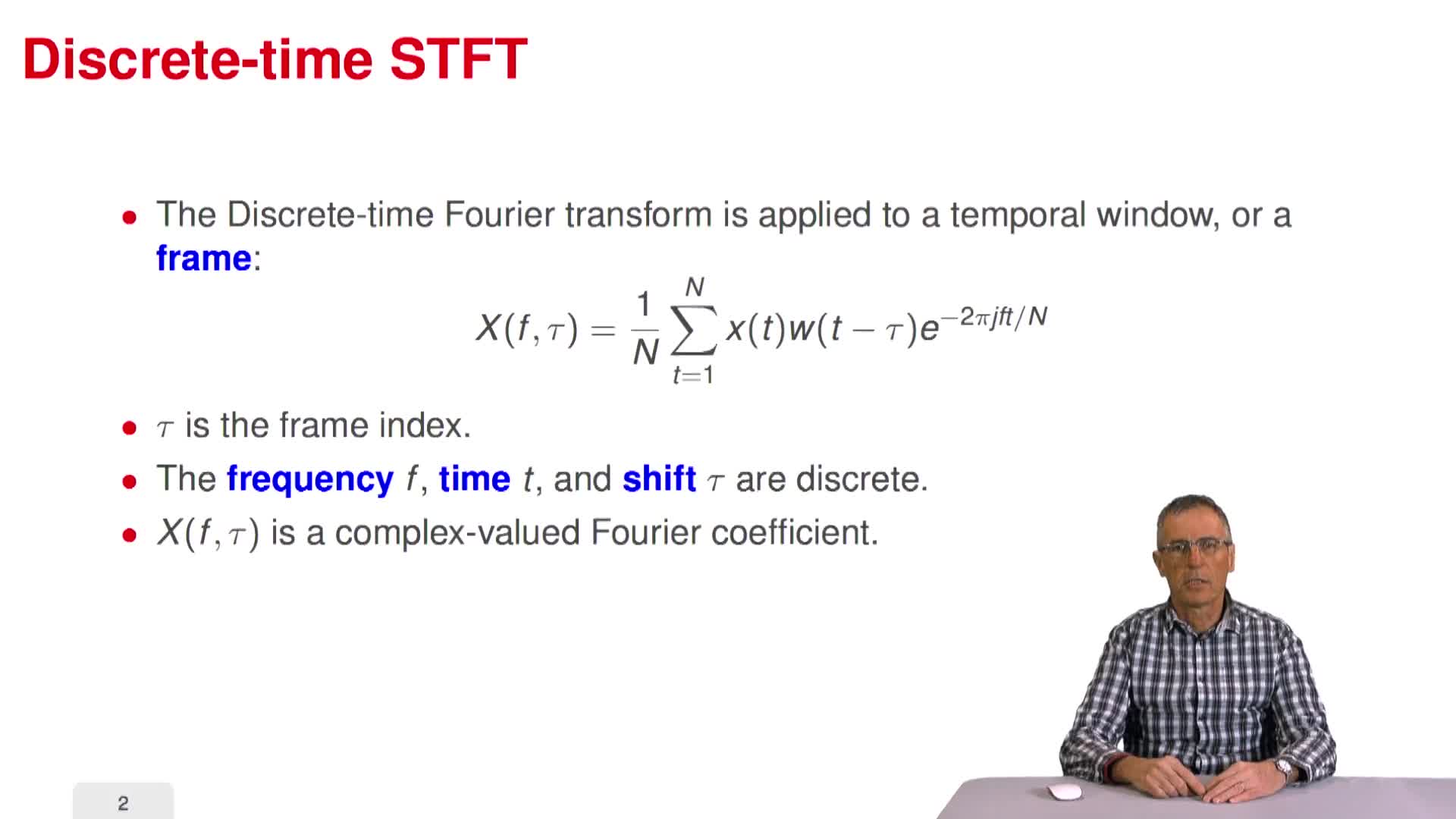
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
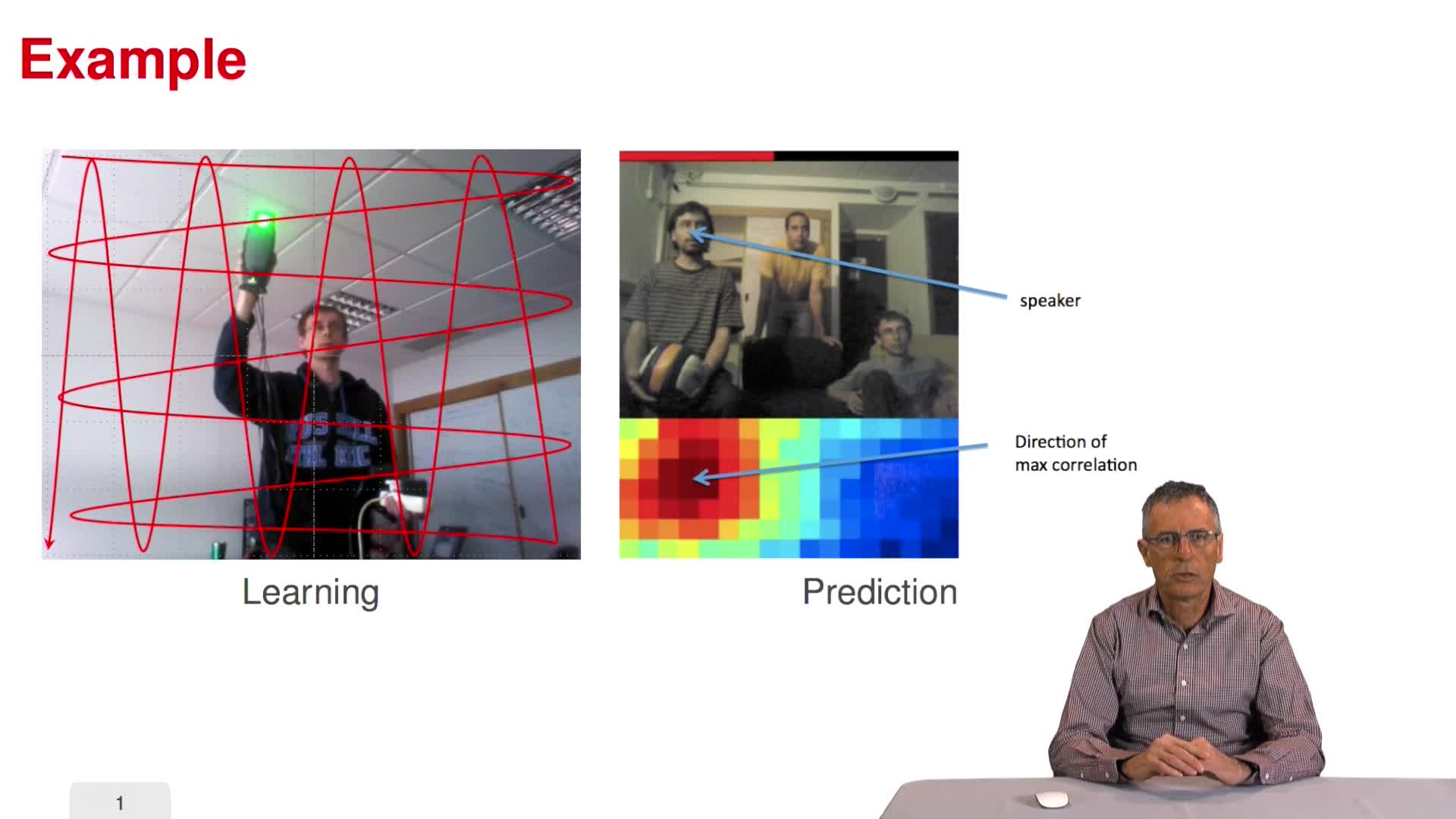
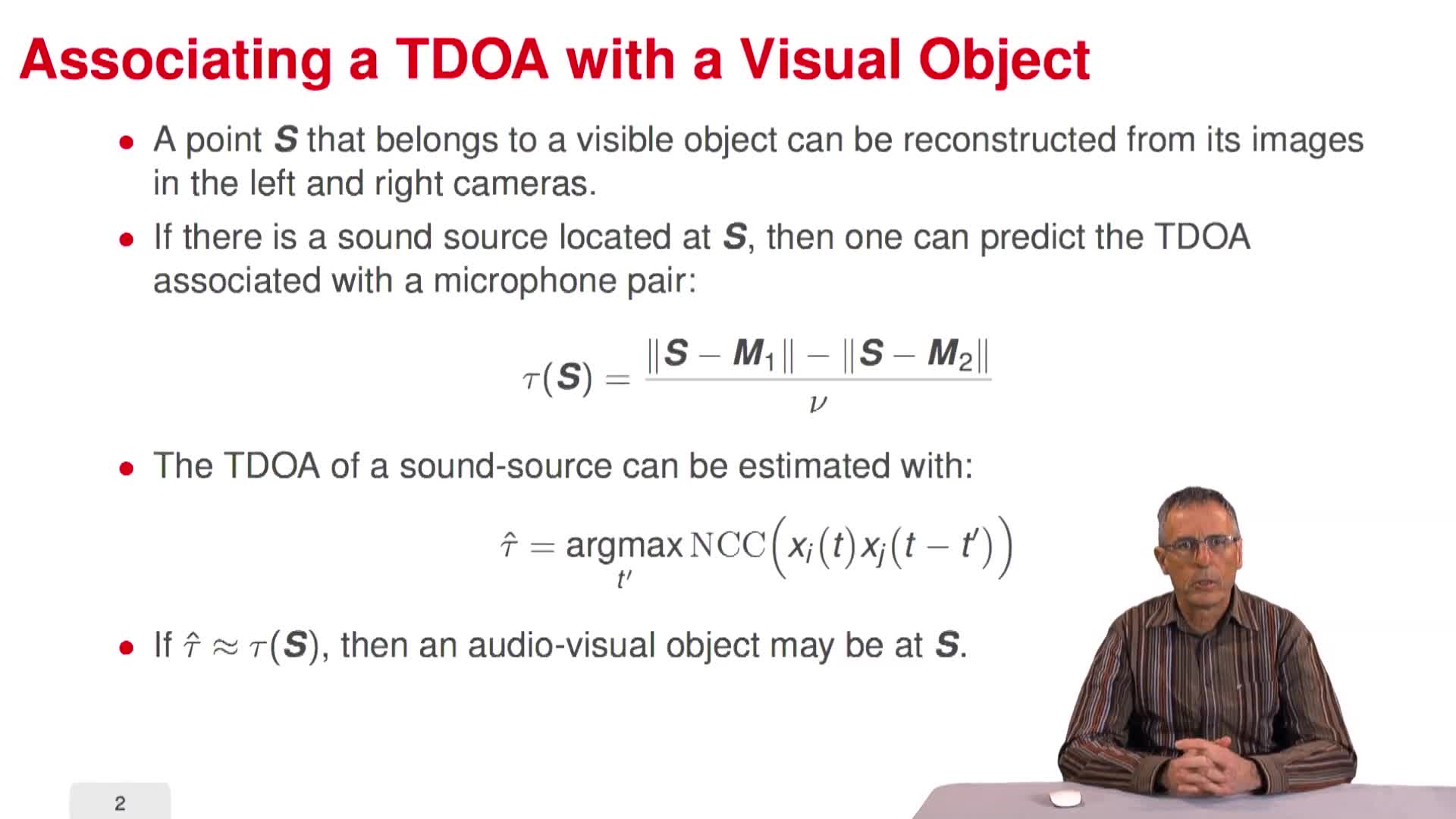
Part 5 : Fusion of Audio and Vision 5.1. Audio-visual processing challenges 5.2. Representation of visual information 5.3. The geometry of vision 5.4. Audio-visual feature association 5.5. Audio
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Part 5 : Fusion of Audio and Vision 5.1. Audio-visual processing challenges 5.2. Representation of visual information 5.3. The geometry of vision 5.4. Audio-visual feature association 5.5. Audio
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Part 5 : Fusion of Audio and Vision 5.1. Audio-visual processing challenges 5.2. Representation of visual information 5.3. The geometry of vision 5.4. Audio-visual feature association 5.5. Audio