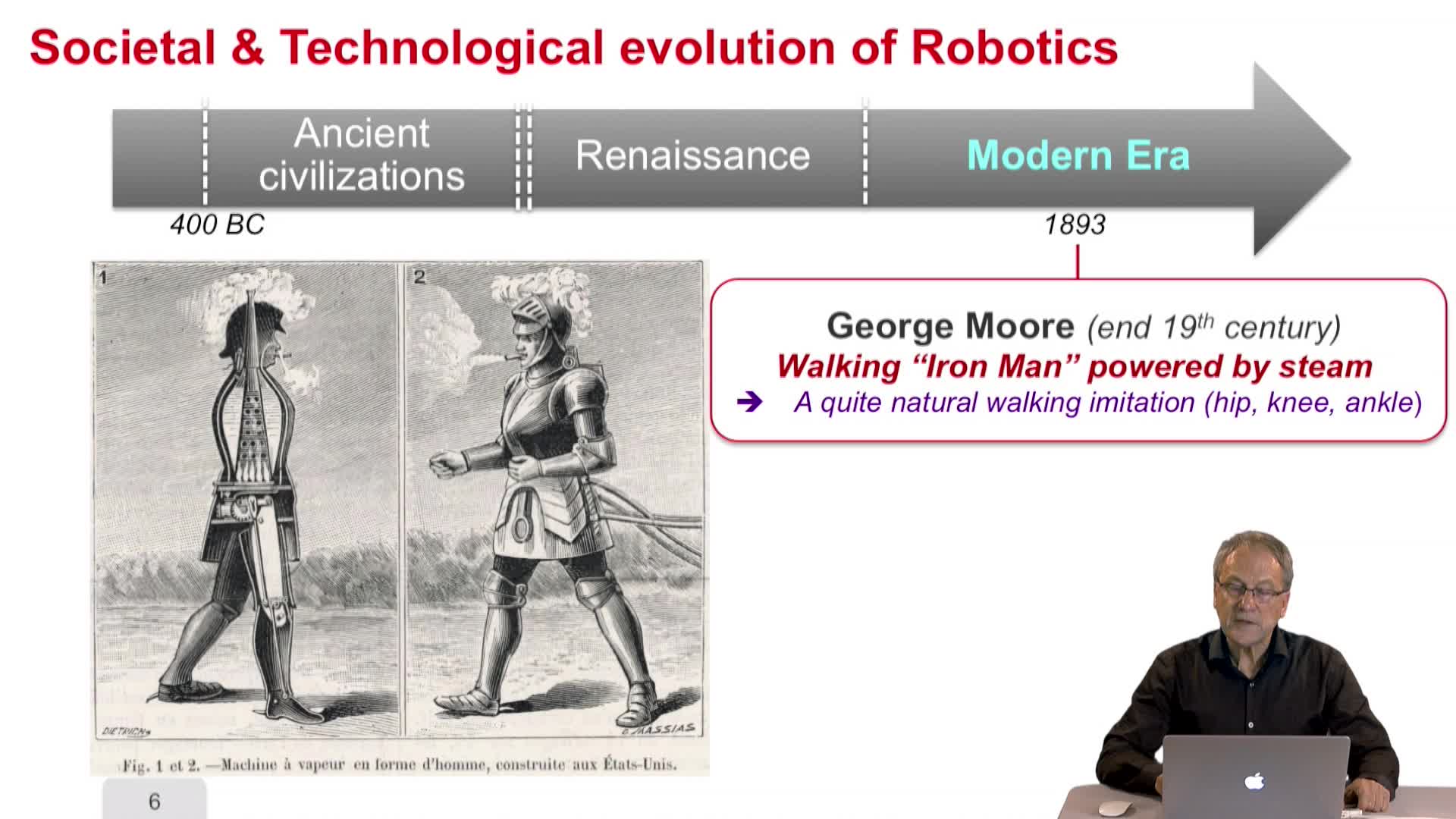
1.2. Technological evolution of Robotics and State of the Art
Laugier
Christian
This video deals with technological evolutions of robotics and state of the art.
Mon compte
Pas encore inscrit ?
This video deals with technological evolutions of robotics and state of the art.
In this video I want to discuss the second two equations of the Kalman filter. And in particular I want to show that these actually perform a kind of weight mean.
In this video, we are going to start working towards building a motion model.
La bibliothèque universitaire inscrit ses modes d'organisation des connaissances, ses règles de fonctionnement, ses acquisitions et ses offres de service dans un accompagnement institutionnel de l
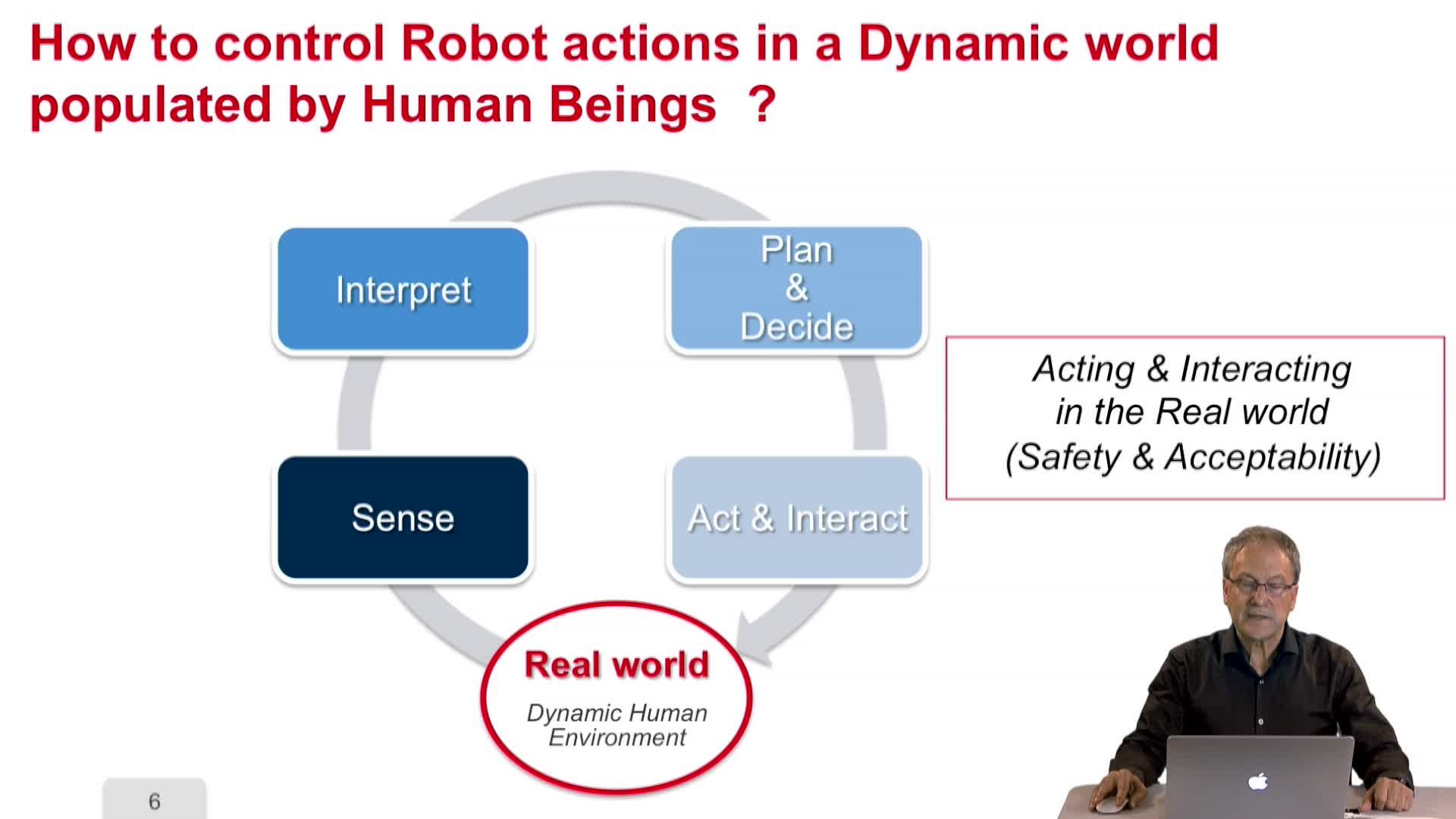
This video is presenting the decision and control architecture for autonomous mobile robots and intelligent vehicles. The question is how to control robot action in a dynamic world populated by
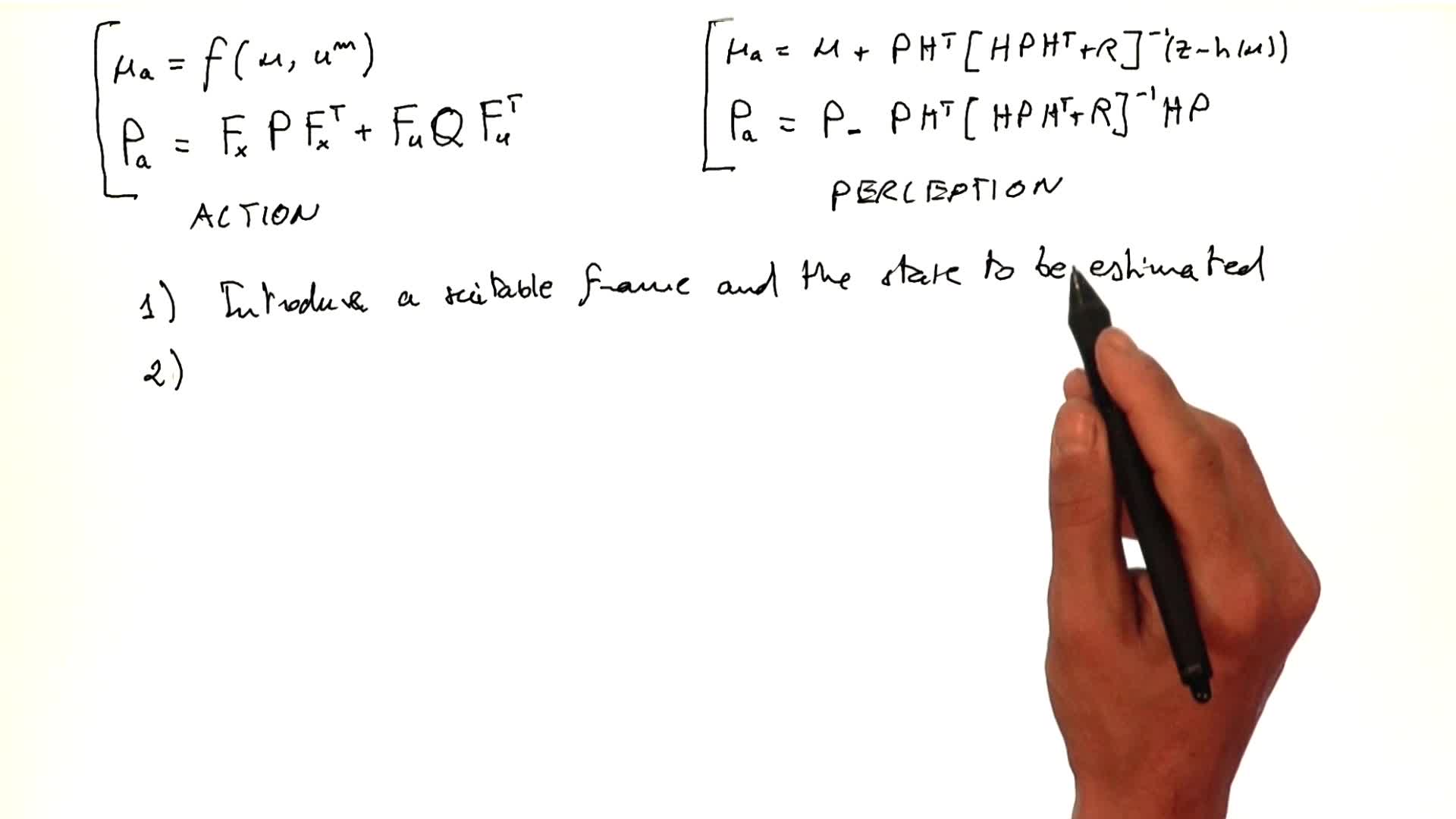
In this video I want to explain the steps that we have to follow in order to implement an extended Kalman filter in robotics.
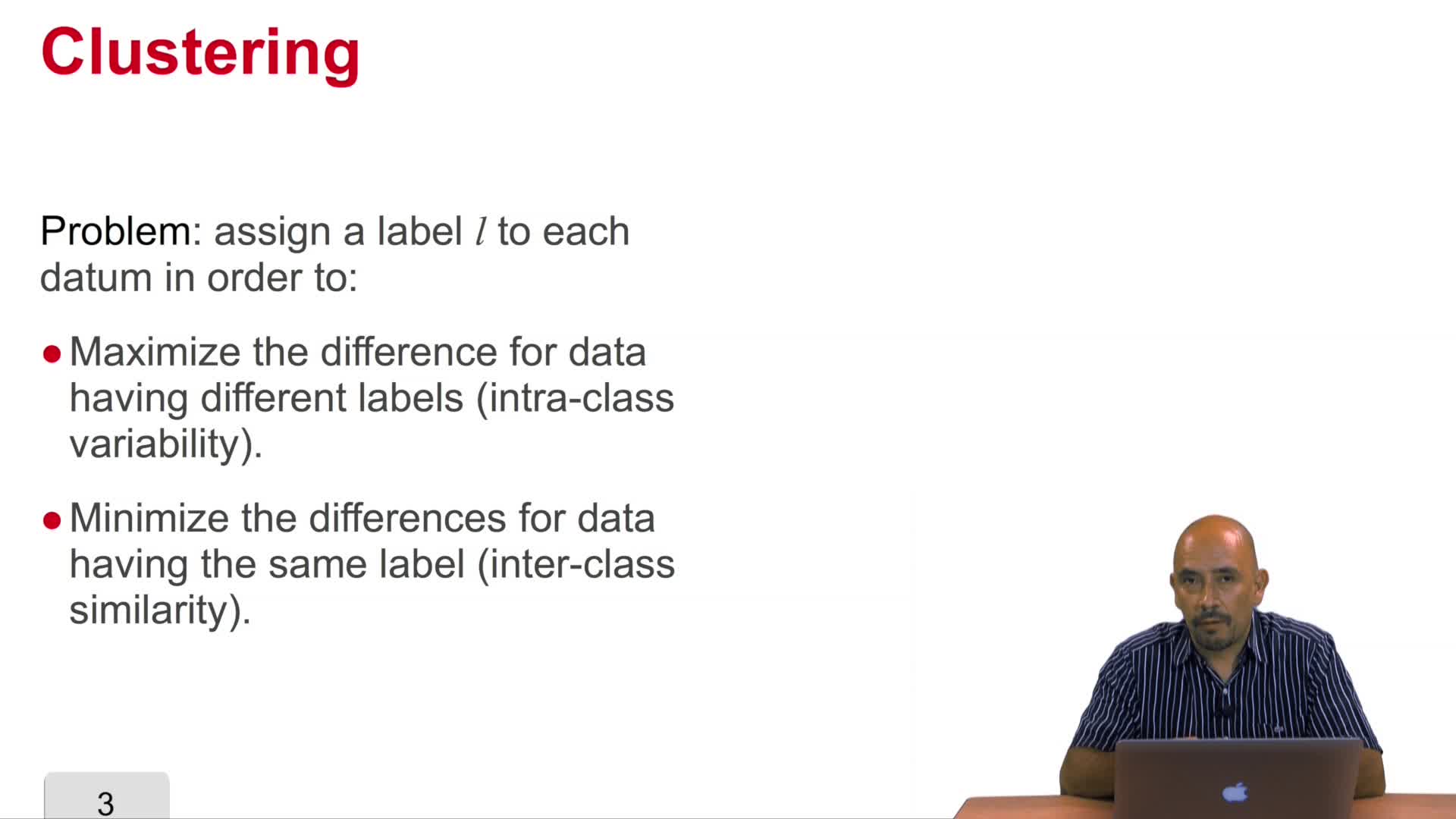
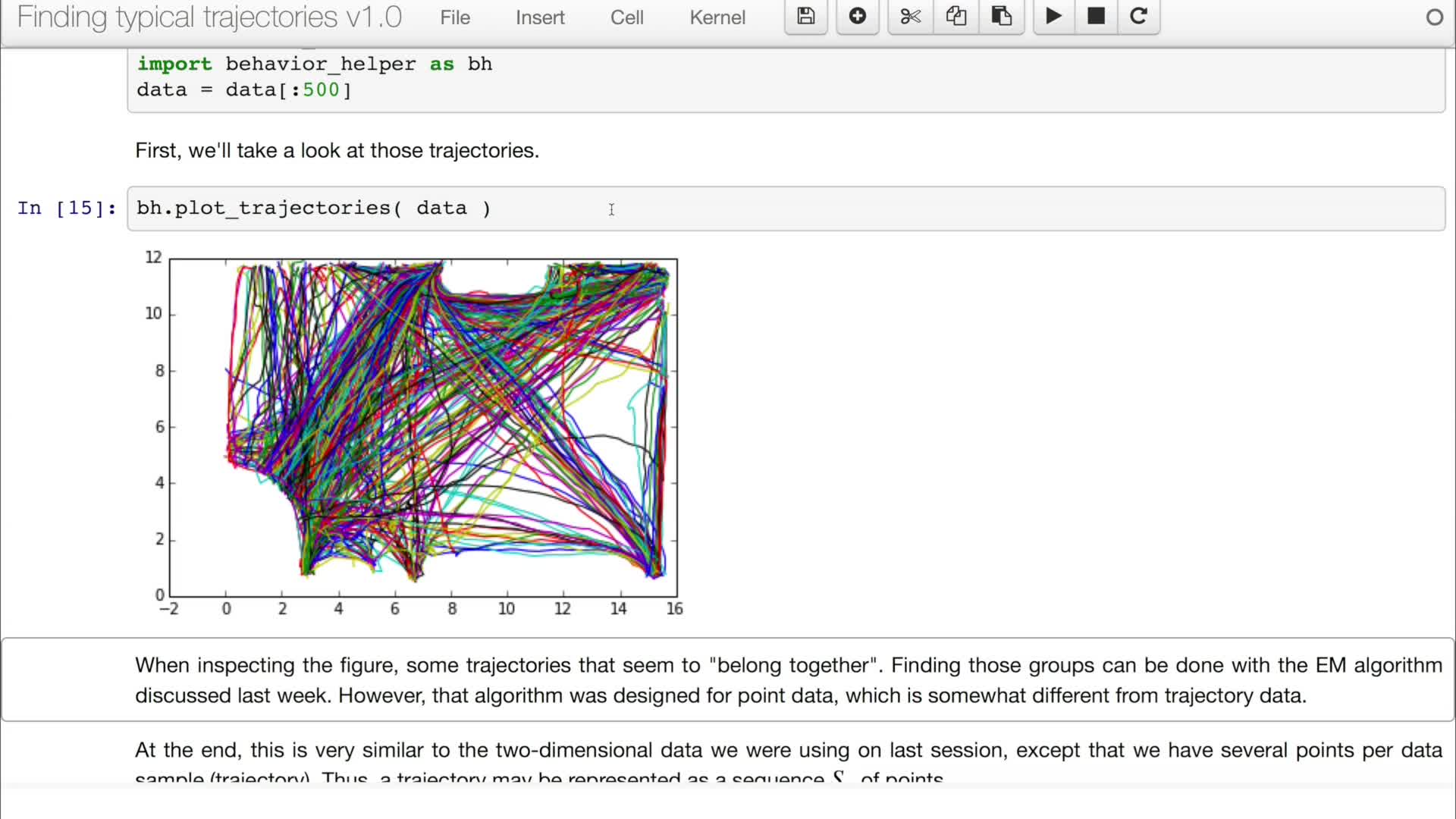
In video 5.2 we showed how to apply the expectation maximization clustering algorithm to two-dimensional data. In this video we will learn how to apply it to trajectory data. And then we will be
La bibliothèque universitaire inscrit ses modes d'organisation des connaissances, ses règles de fonctionnement, ses acquisitions et ses offres de service dans un accompagnement institutionnel de l
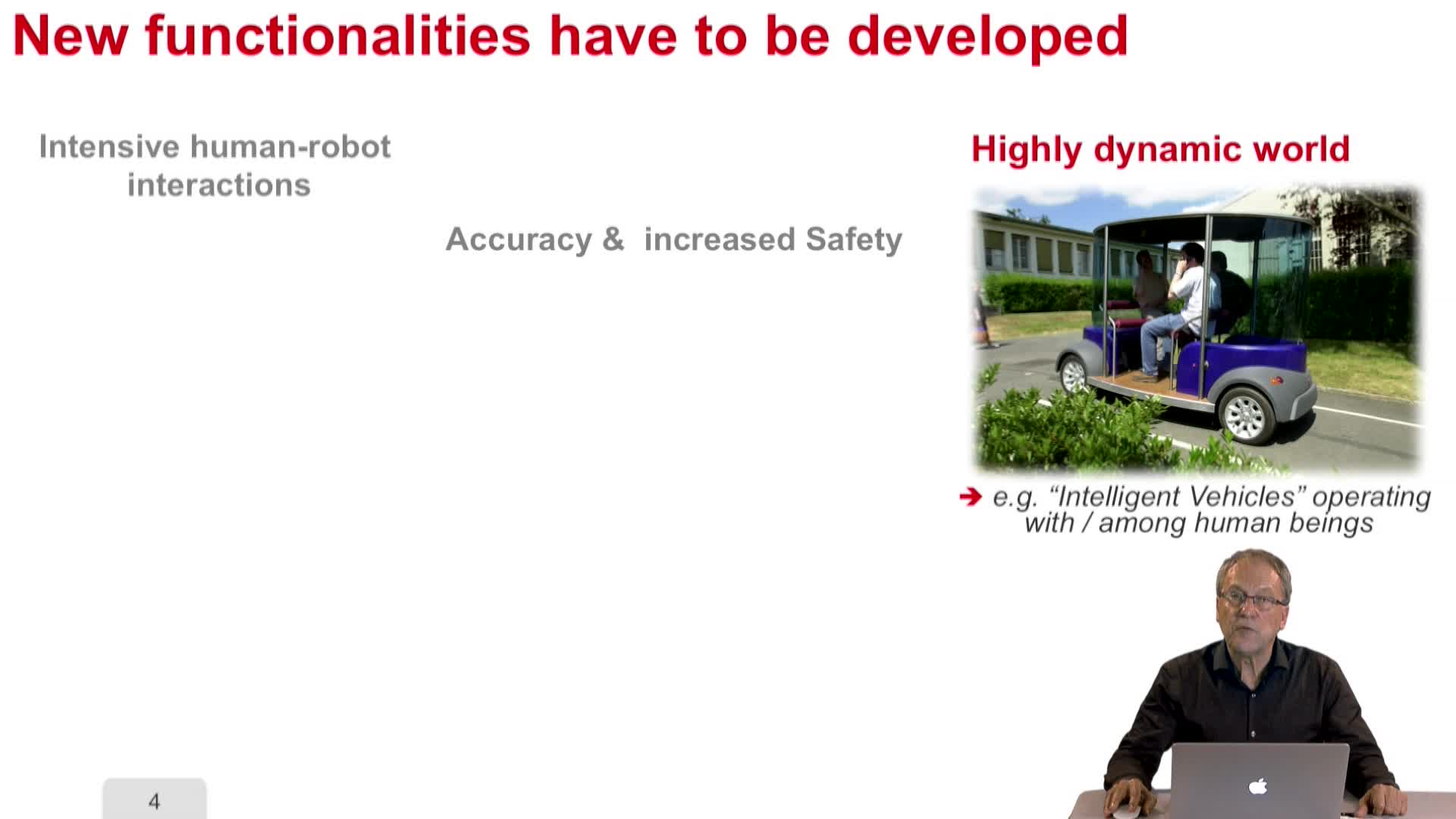
Introducing robots in human environments bring new challenges to robotics.
In this video, we are discussing the SLAM problem: simultaneous localization and mapping.
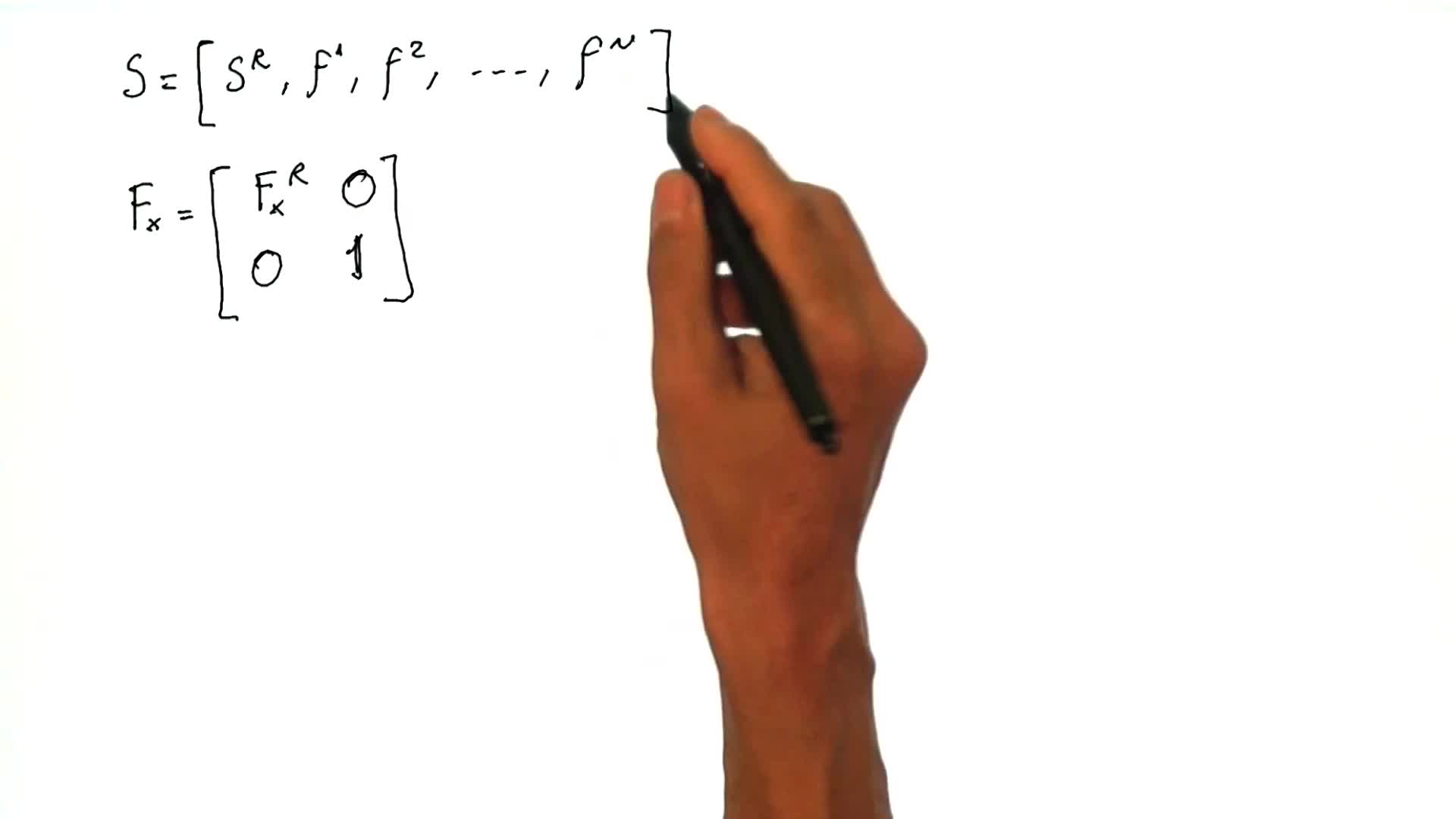
In this video we are aiming to improve on the results we obtained in video 5.3a, in particular with respect to the greyed-out trajectories that are badly represented.
Accessible à de nombreuses applications, tant en biologie ou qu'en technologie des pêches, la vidéo sous-marine est de plus en plus utilisée dans le domaine de la recherche halieutique. Les progrès