1.4. Decisional and Control Architecture for Autonomous Mobile Robots and IV
Laugier
Christian
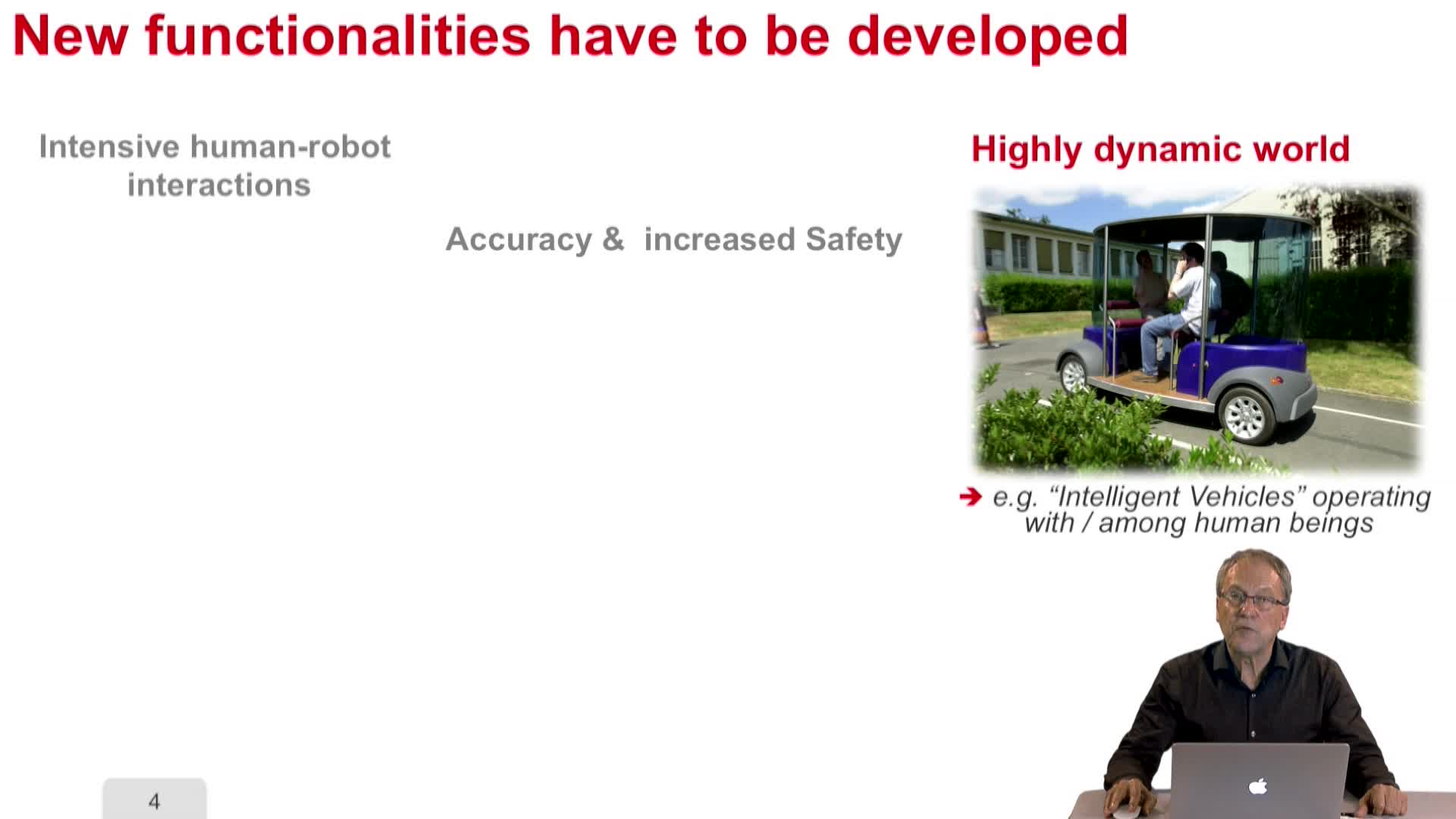
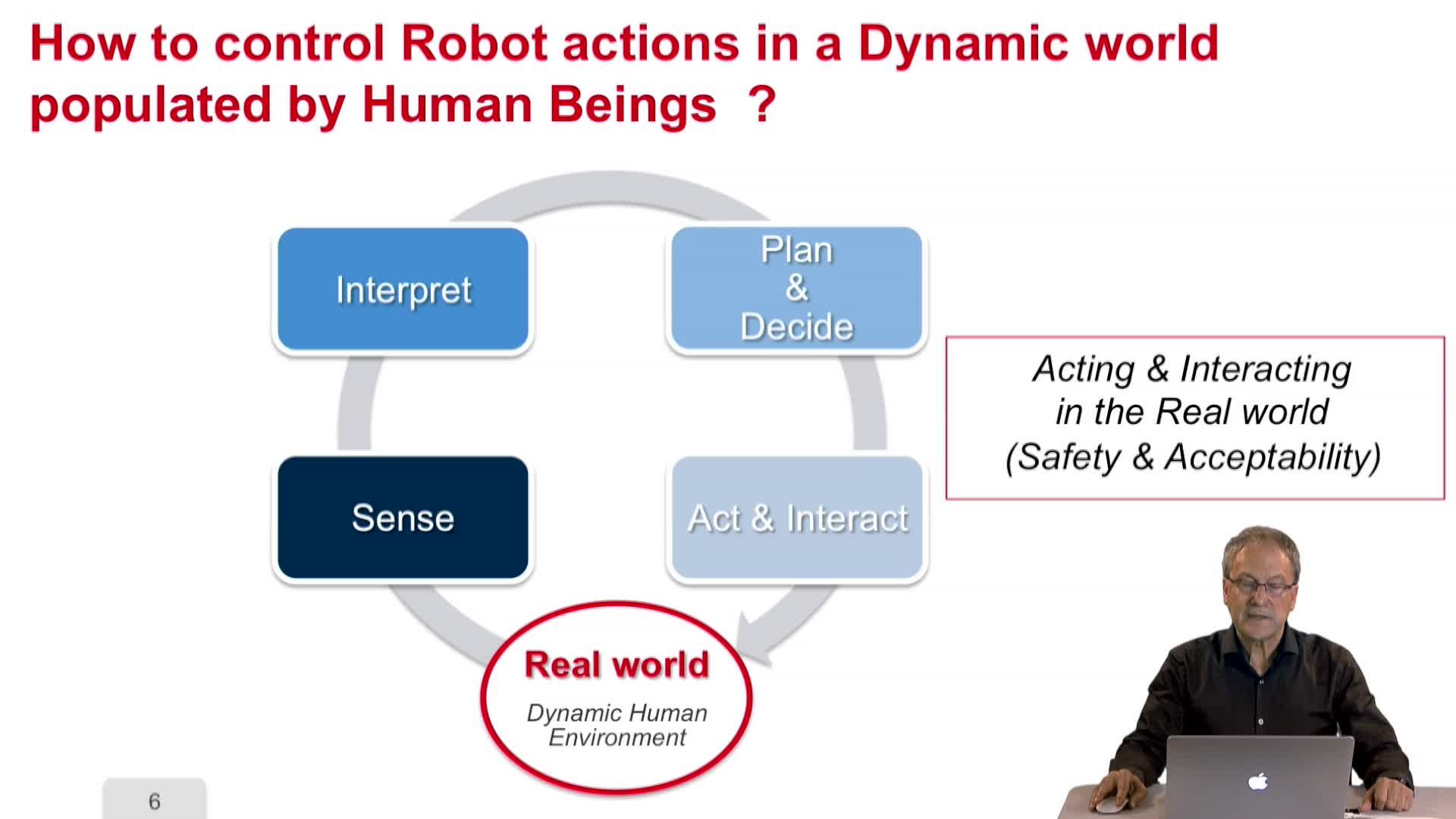
This video is presenting the decision and control architecture for autonomous mobile robots and intelligent vehicles. The question is how to control robot action in a dynamic world populated by