Laugier, Christian (1947-.... ; informaticien)
- Génie informatique
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
Vidéos
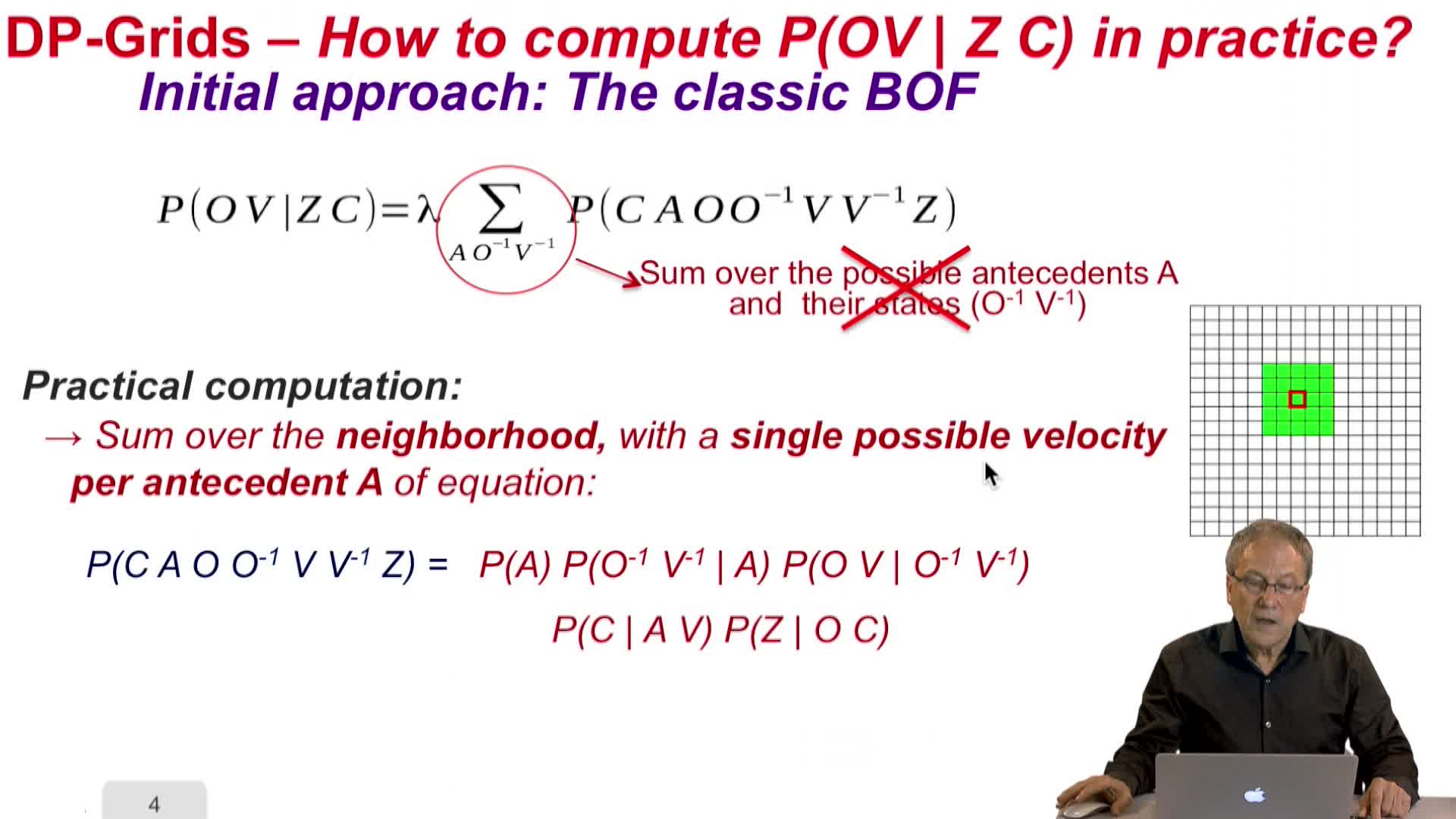
4.3. Dynamic Probabilistic Grids – Implementation approaches
This video addresses the problem of the practical implementation for the dynamic probabilistic grid.
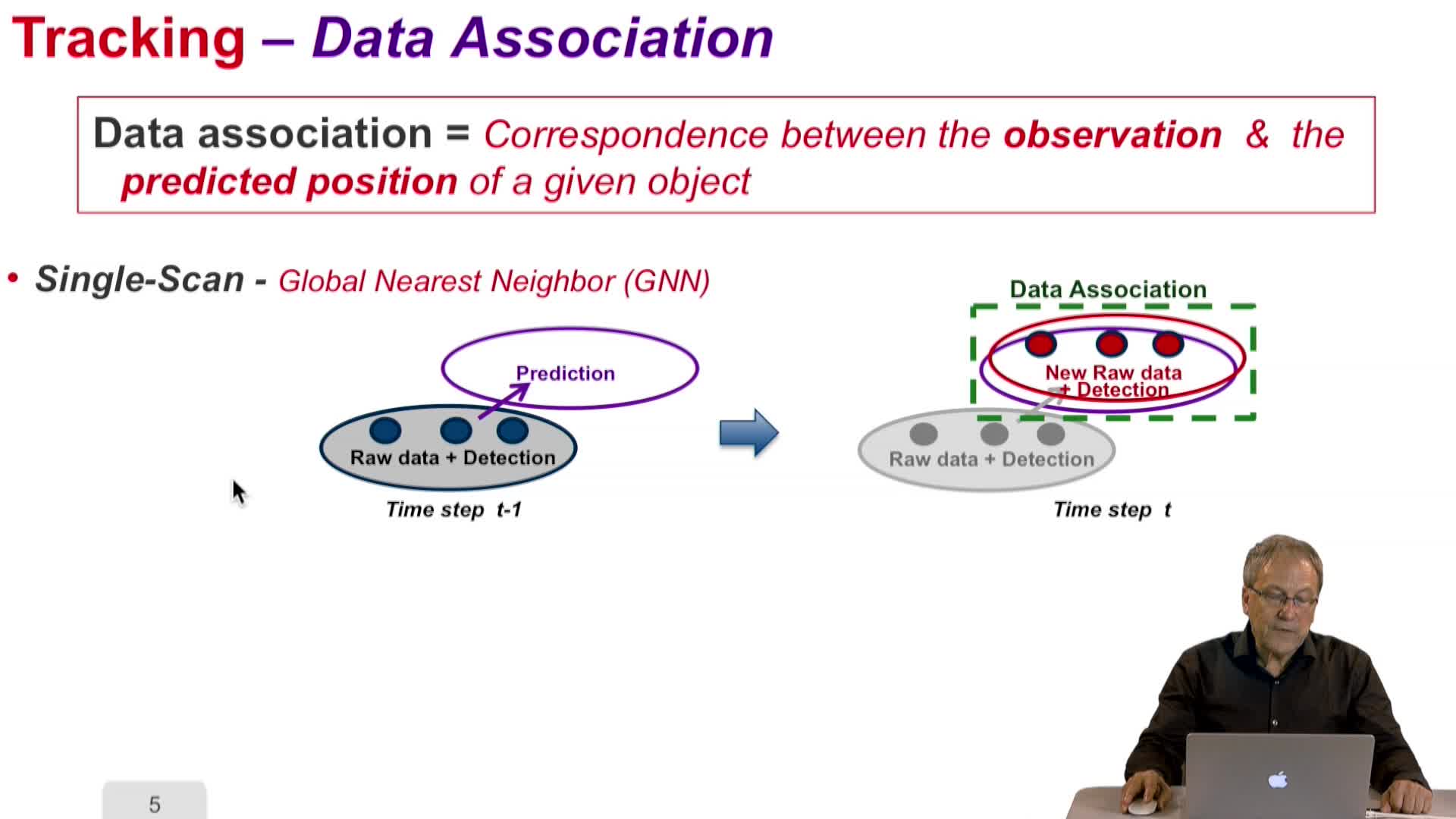
4.5. Detection and Tracking of Mobile Objects – Problem and Approaches
This video adresses the Detection and Tracking of Mobile Objects (DATMO) problem.
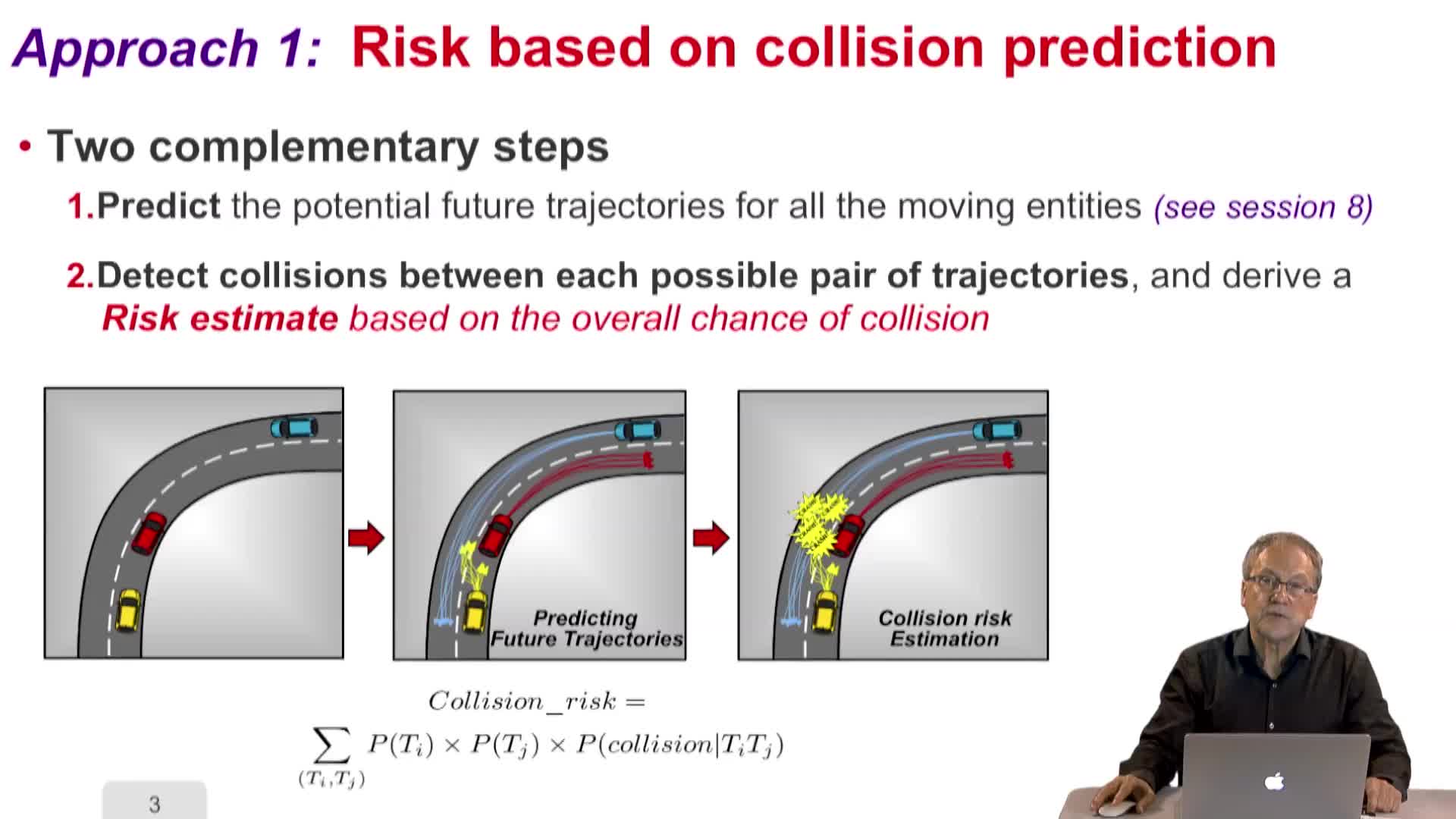
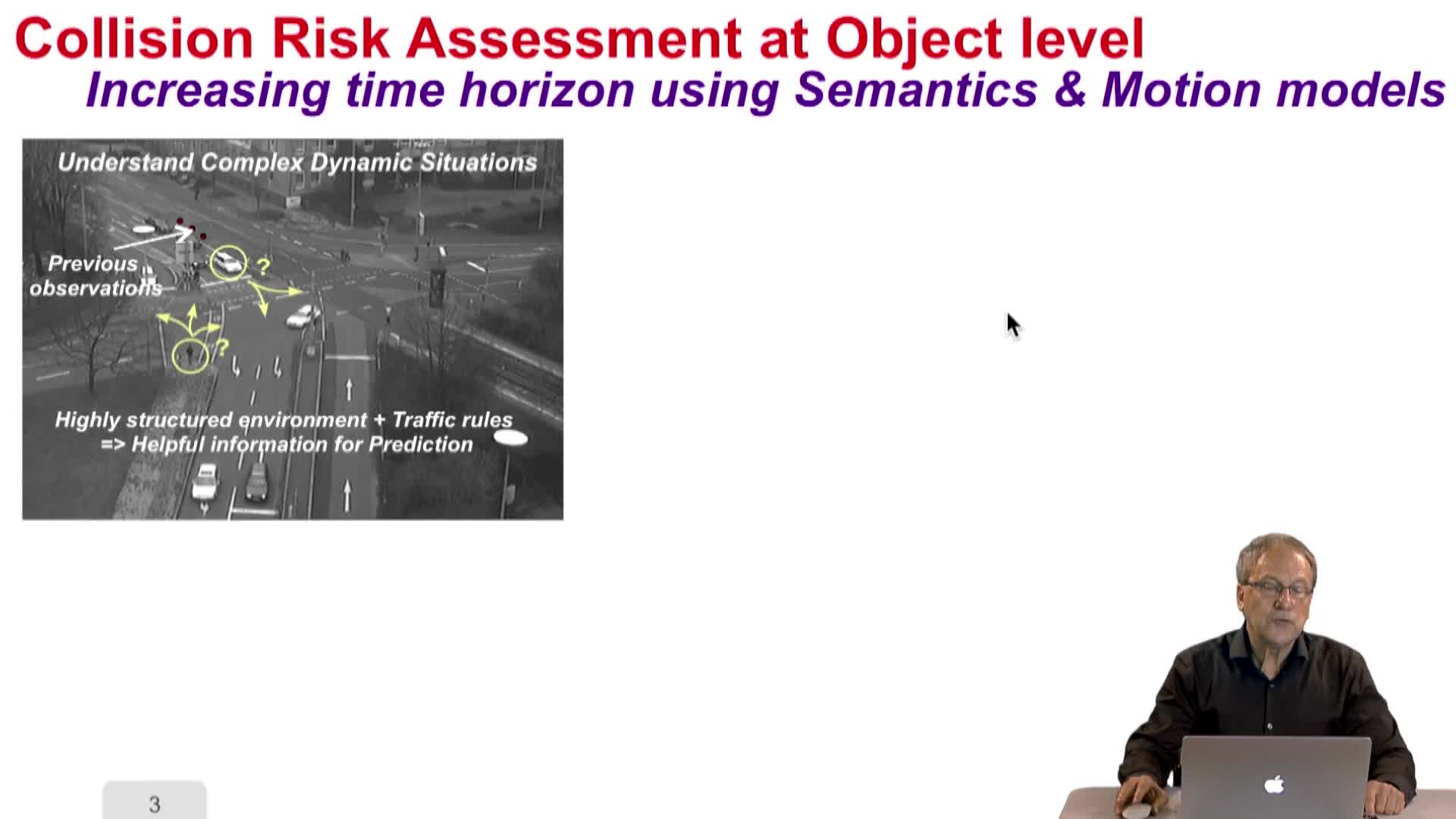
4.9. Situation Awareness – Collision Risk Assessment and Decision (Object level)
This video addresses the problem of collision risk assessment and decision.
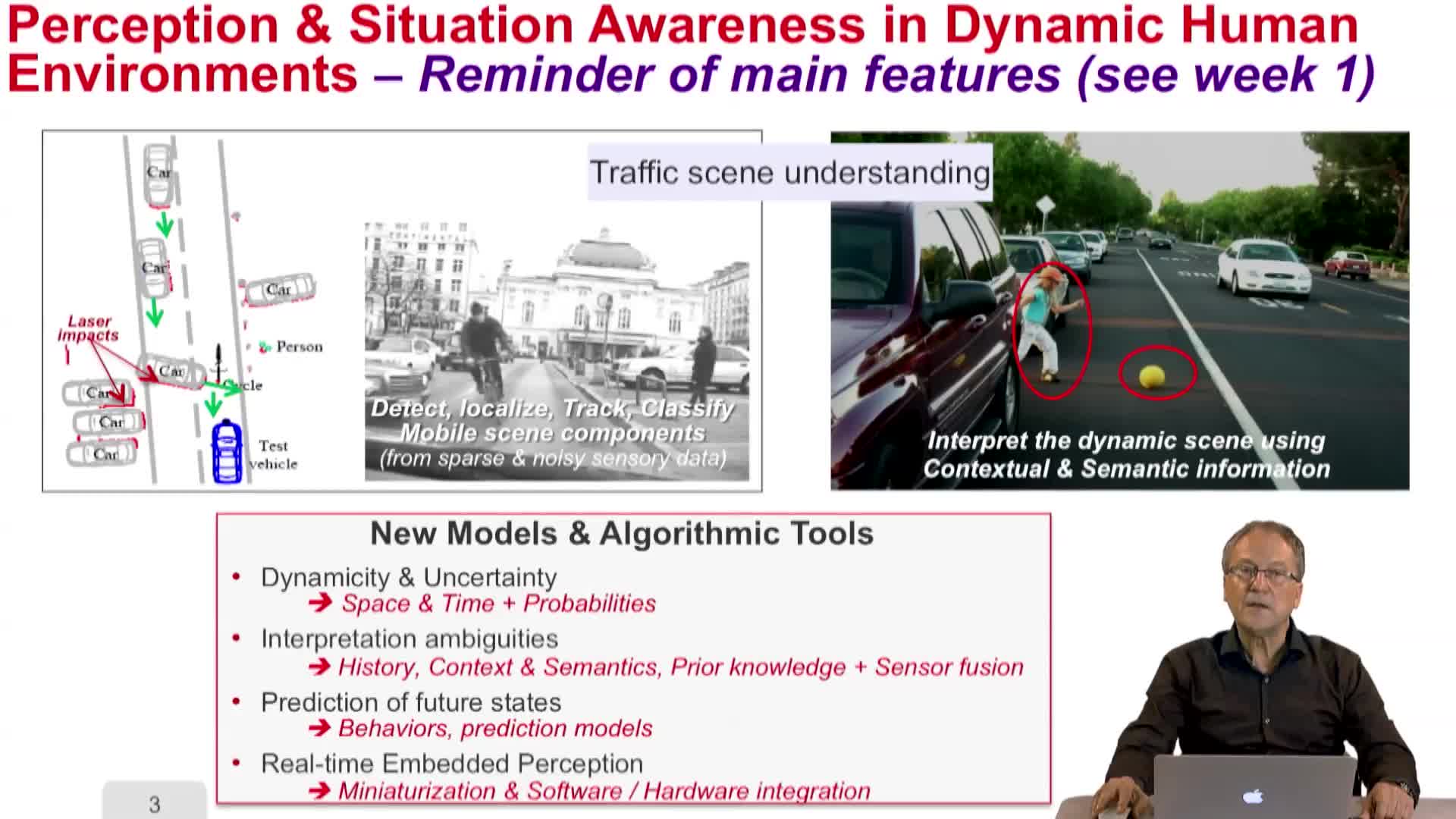
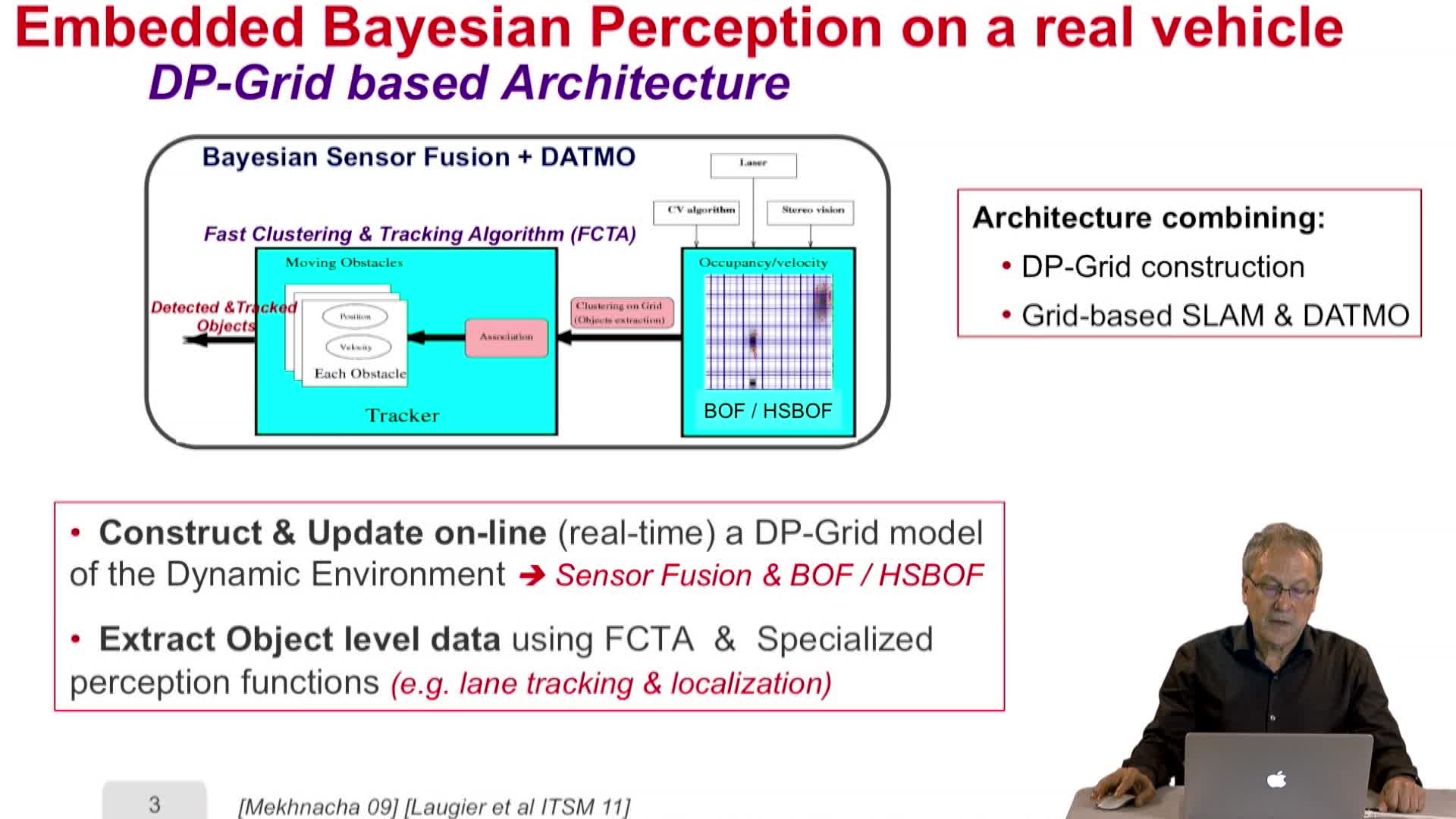
4.1. Robot Perception for Dynamic environments: Outline and DP-Grids concept
The fourth part of the course addresses perception, situation awareness and decision making. In this first video, we're giving an outline of the problem and introducing the new concept of dynamic
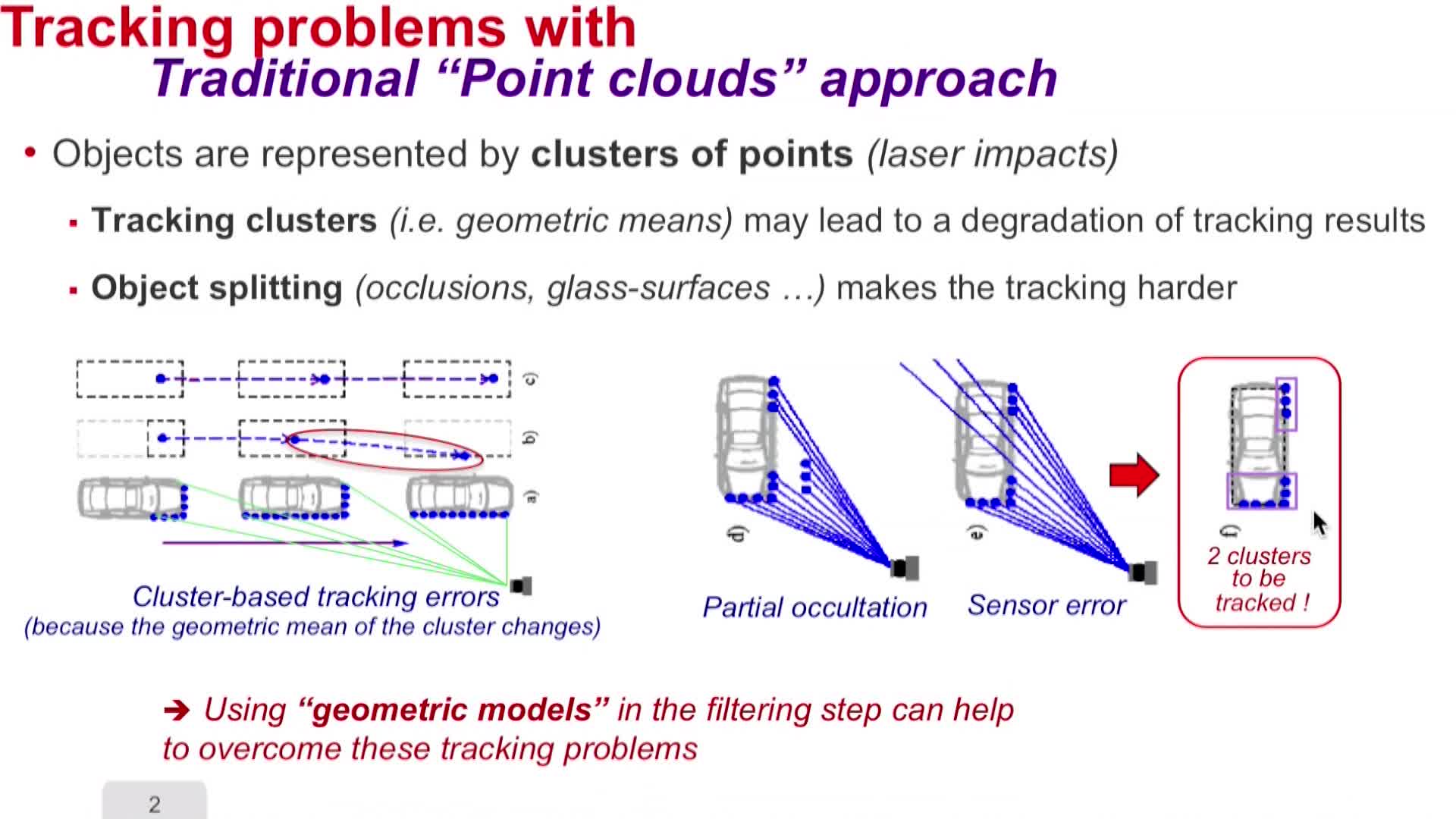
4.6. Detection and Tracking of Mobile Objects – Model and Grid based approaches
This video addresses the question of model-based and grid-based approaches.
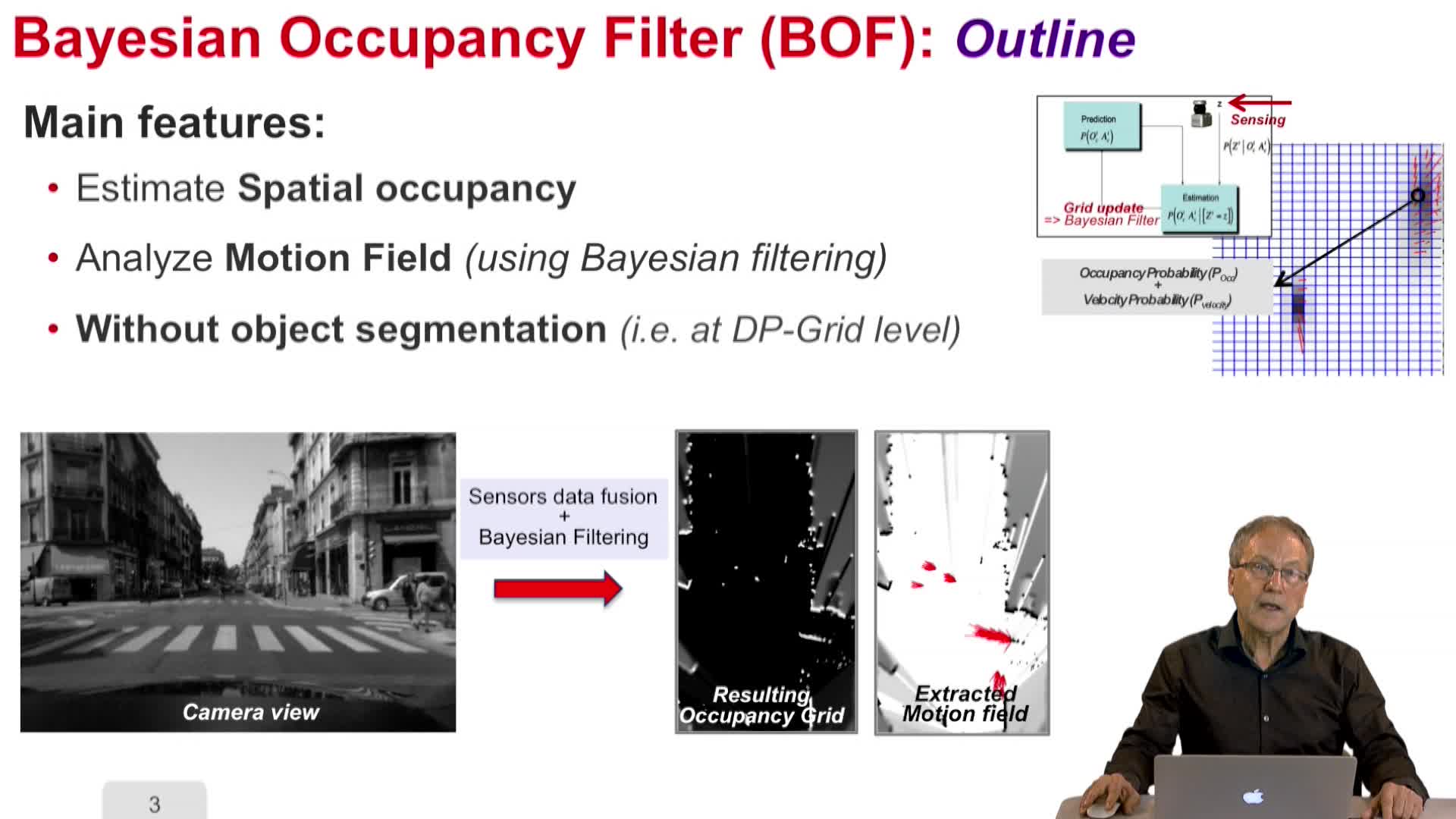
4.2. Dynamic Probabilistic Grids – Bayesian Occupancy Filter concept
This video will show how to describe Bayesian occupancy filter concept.
4.8. Situation Awareness – Problem statement and Motion / Prediction Models
This videos addresses the problem of situation awareness and motion prediction models.
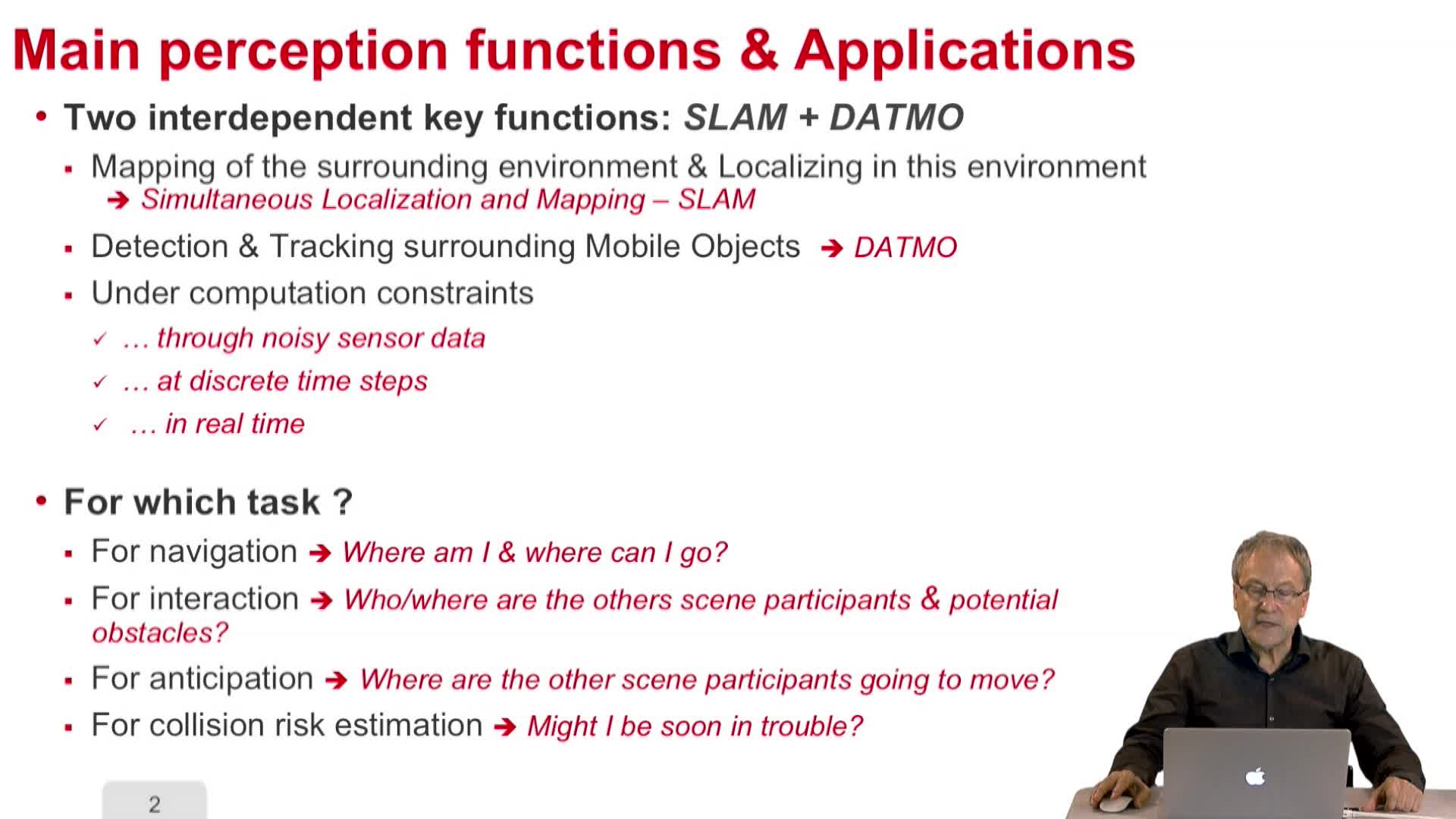
4.4. Object level Perception functions (SLAM + DATMO)
This video is dedicated to the object level perception functions: Simultaneous Localization Mapping (SLAM) and Detection and Tracking surrounding Mobile Objects (DATMO).
4.7. Embedded Bayesian Perception and Short-term collision risk (DP-Grid level)
This video deals with embedded Bayesian perception and short-term collision risk.
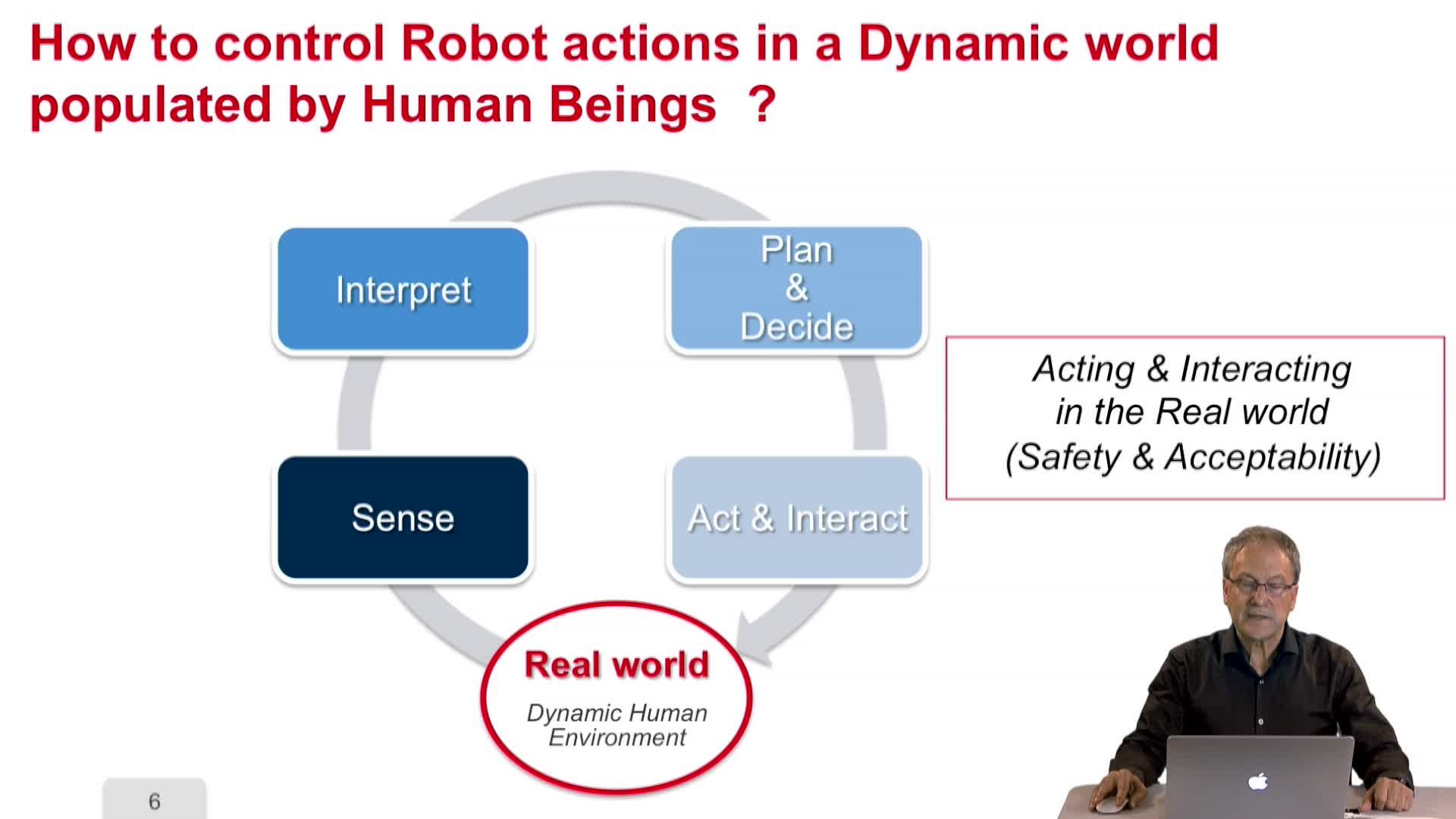
1.4. Decisional and Control Architecture for Autonomous Mobile Robots and IV
This video is presenting the decision and control architecture for autonomous mobile robots and intelligent vehicles. The question is how to control robot action in a dynamic world populated by
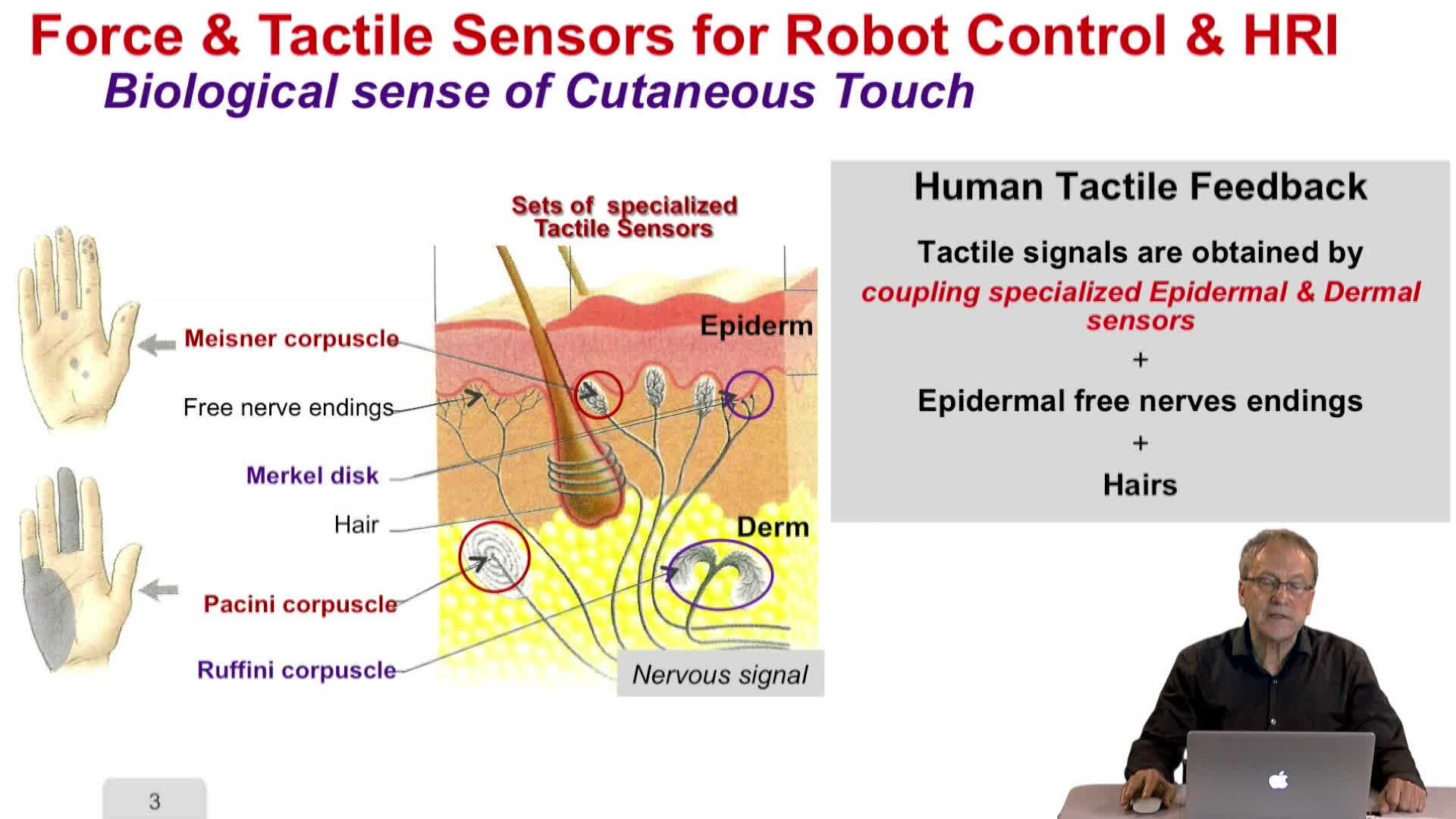
1.6. Sensing technologies: Robot Control and HRI
This video addresses sensing technology, and focuses on robot control and human-robot interaction applications.
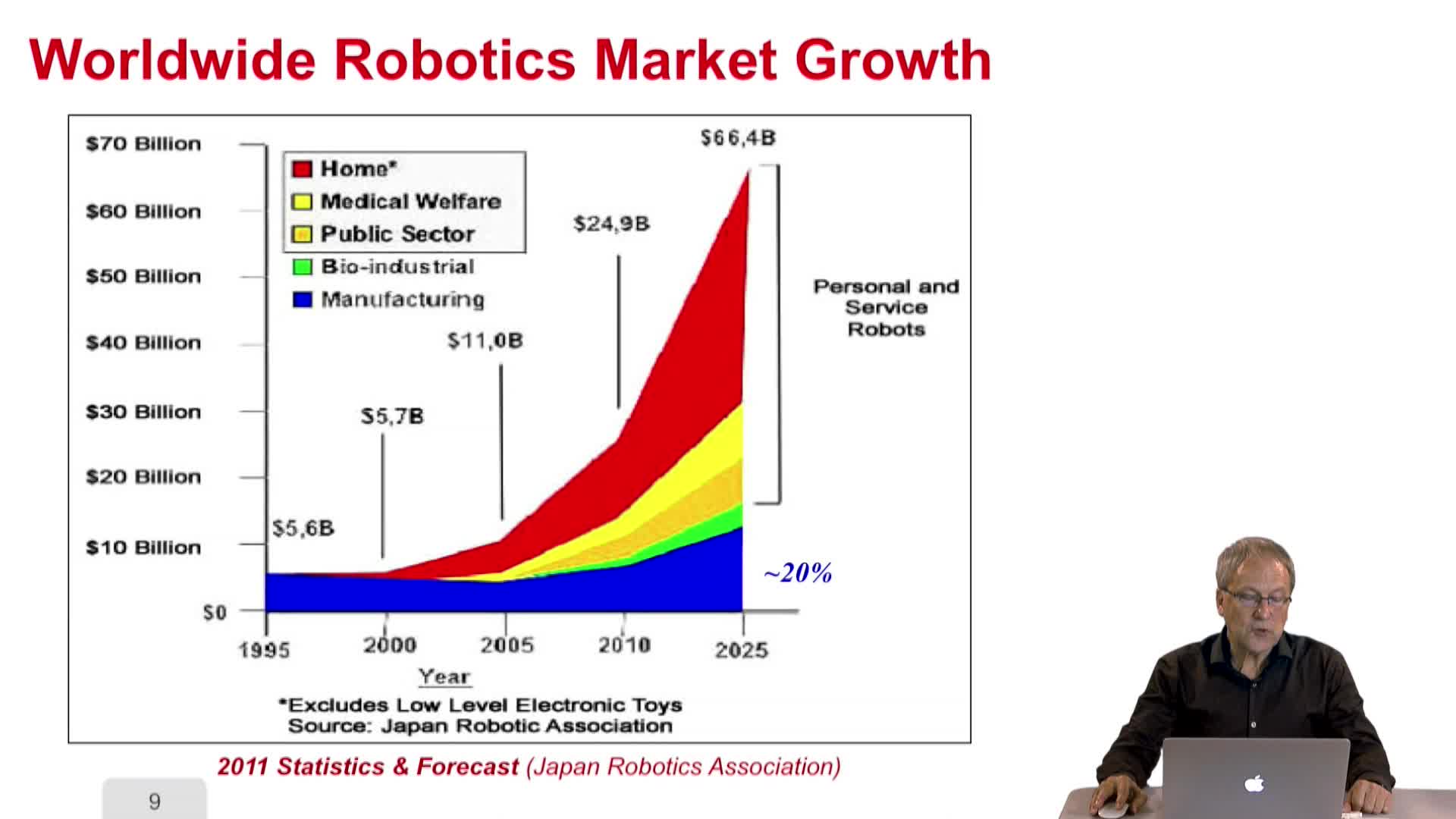
1.1. Socio-economic context
This is the first lesson of the course on mobile robots and autonomous vehicles. It addresses the objectives, the challenges, the state of the art and the technologies.