Vasquez Govea, Alejandro Dizan (1970-.... ; auteur en traitement du signal)
- Génie informatique
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
Vidéos
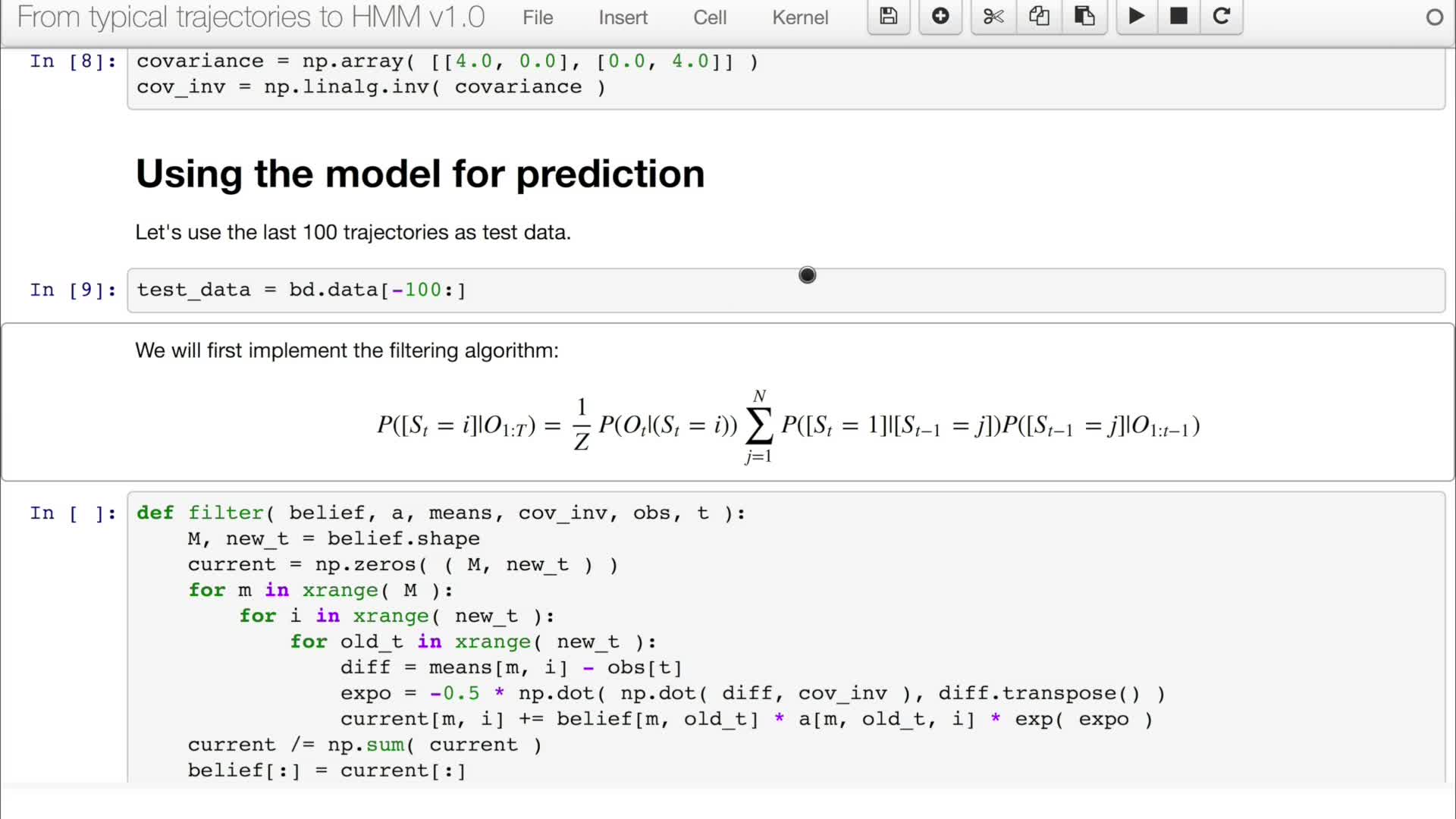
5.6. Predicting Human Motion
In video 5.5 we have defined an HMM in Python. In this video we are going to learn how to use it to estimate and predict motion.
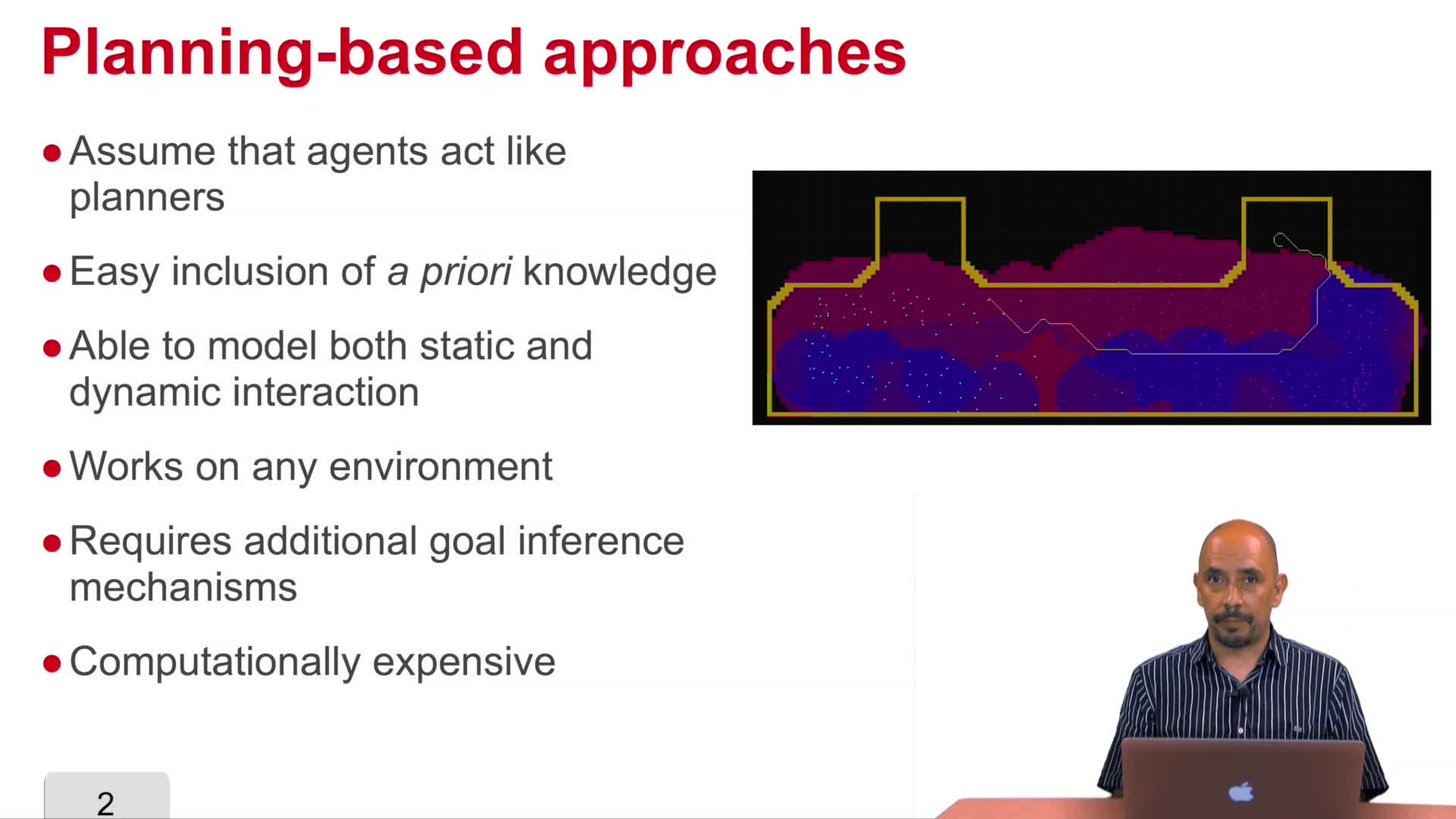
5.9. Other approaches: Planning-based approaches
In this video we are going to study a second, and probably the most promising alternative for motion prediction: planning-based algorithms.
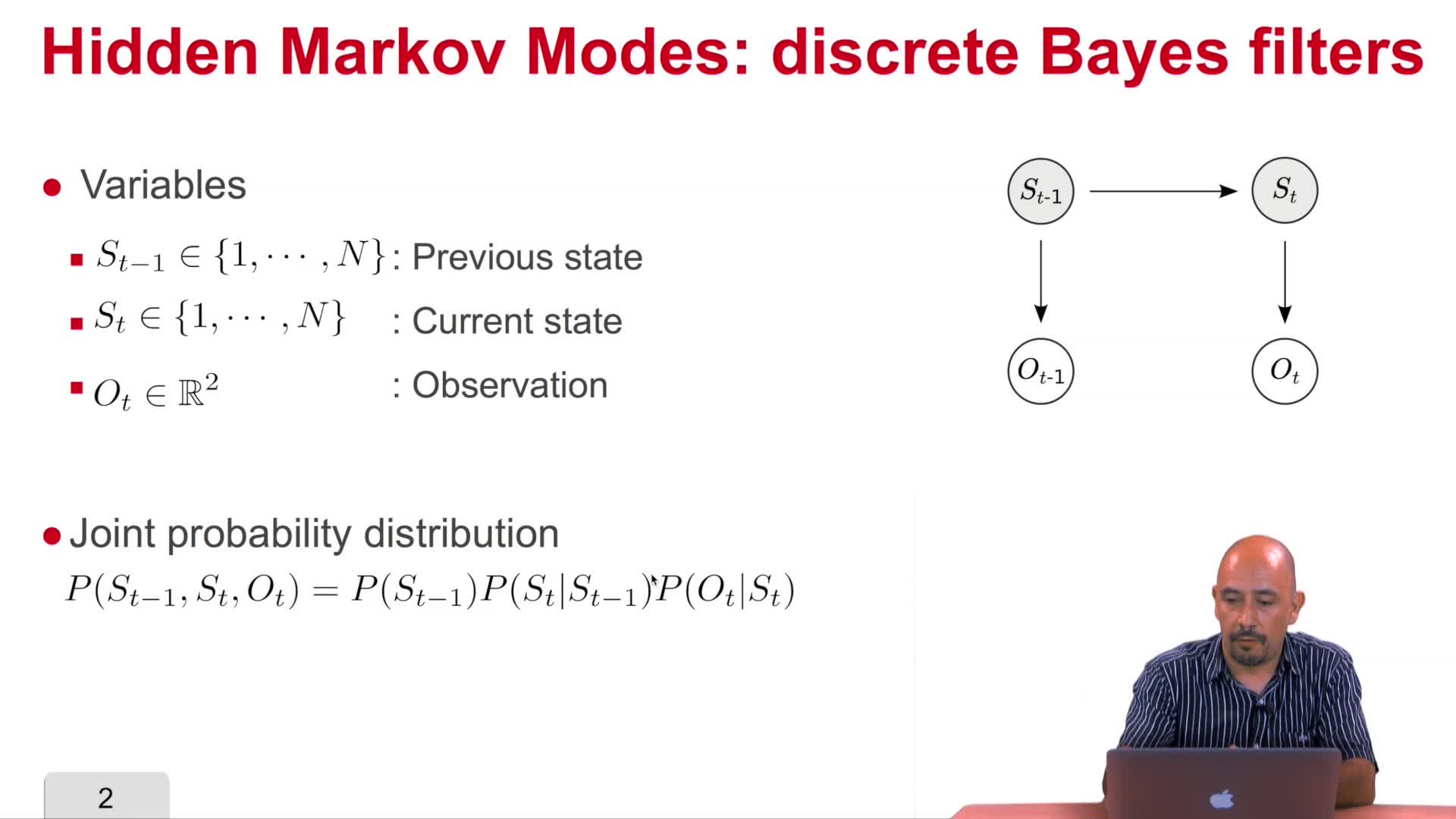
5.4. Bayesian filter inference
In this video we will review the base filter and we will study a particular instance of the Bayesian filter called Hidden Markov models which is a discrete version of a Bayesian filter.
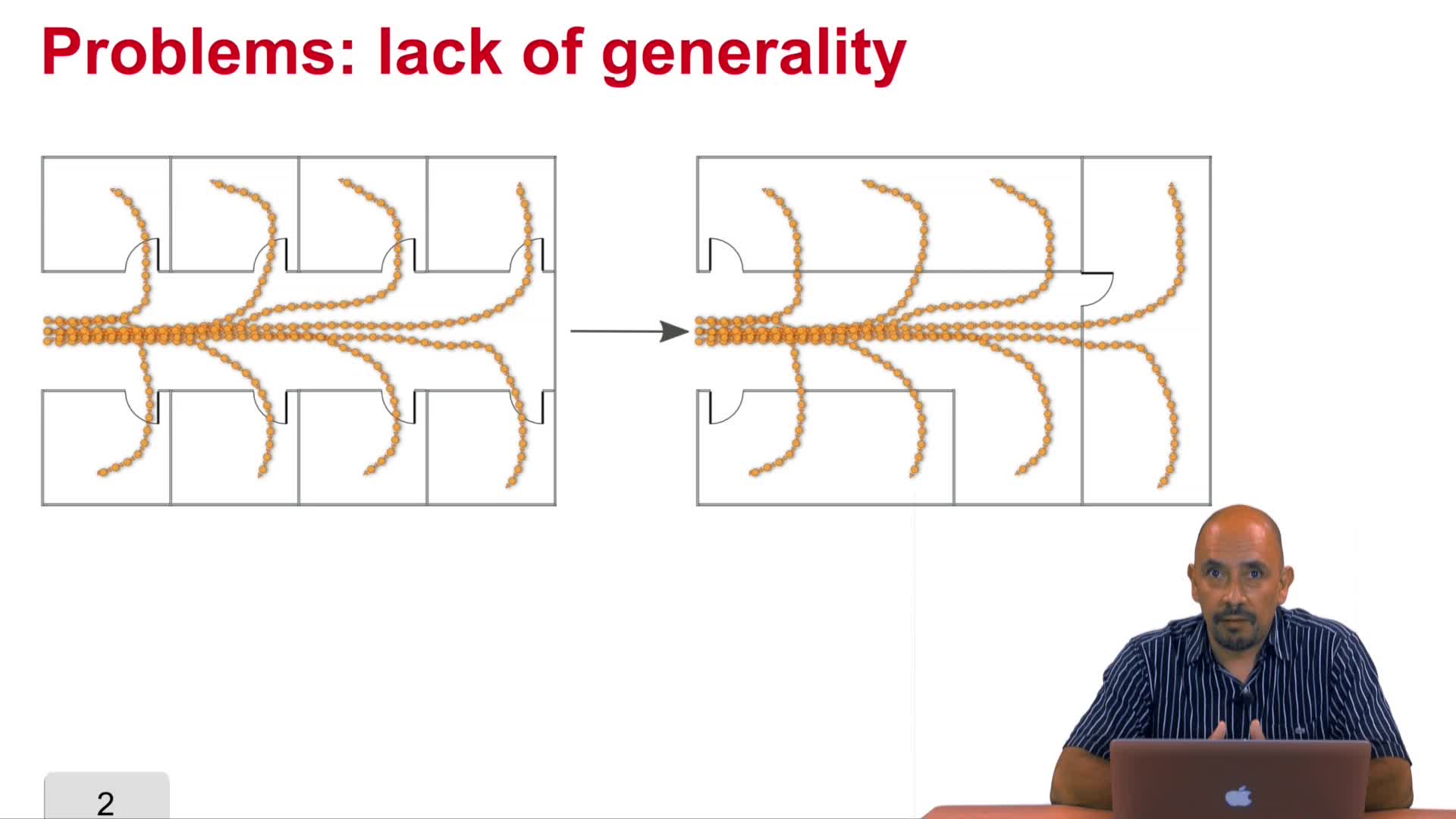
5.7. Typical Trajectories: drawbacks
In previous videos we have discussed how to implement the typical trajectories and motion patterns approach. In this video we are going to discuss what are the drawbacks of such an approach,
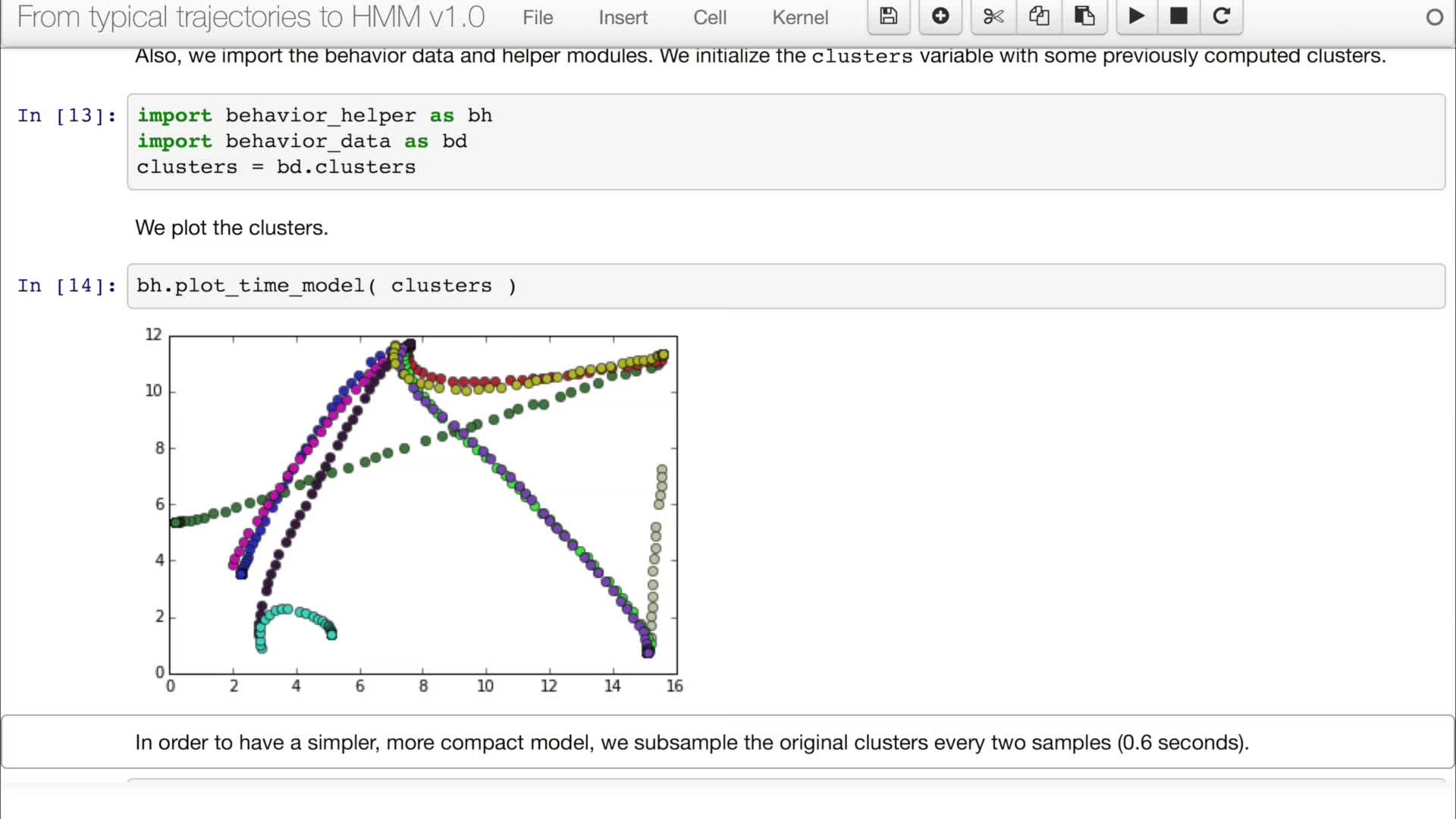
5.5. From trajectories to discrete time-state models
In this video we are going to apply the concepts we have reviewed in the video 5.4 into real trajectories.
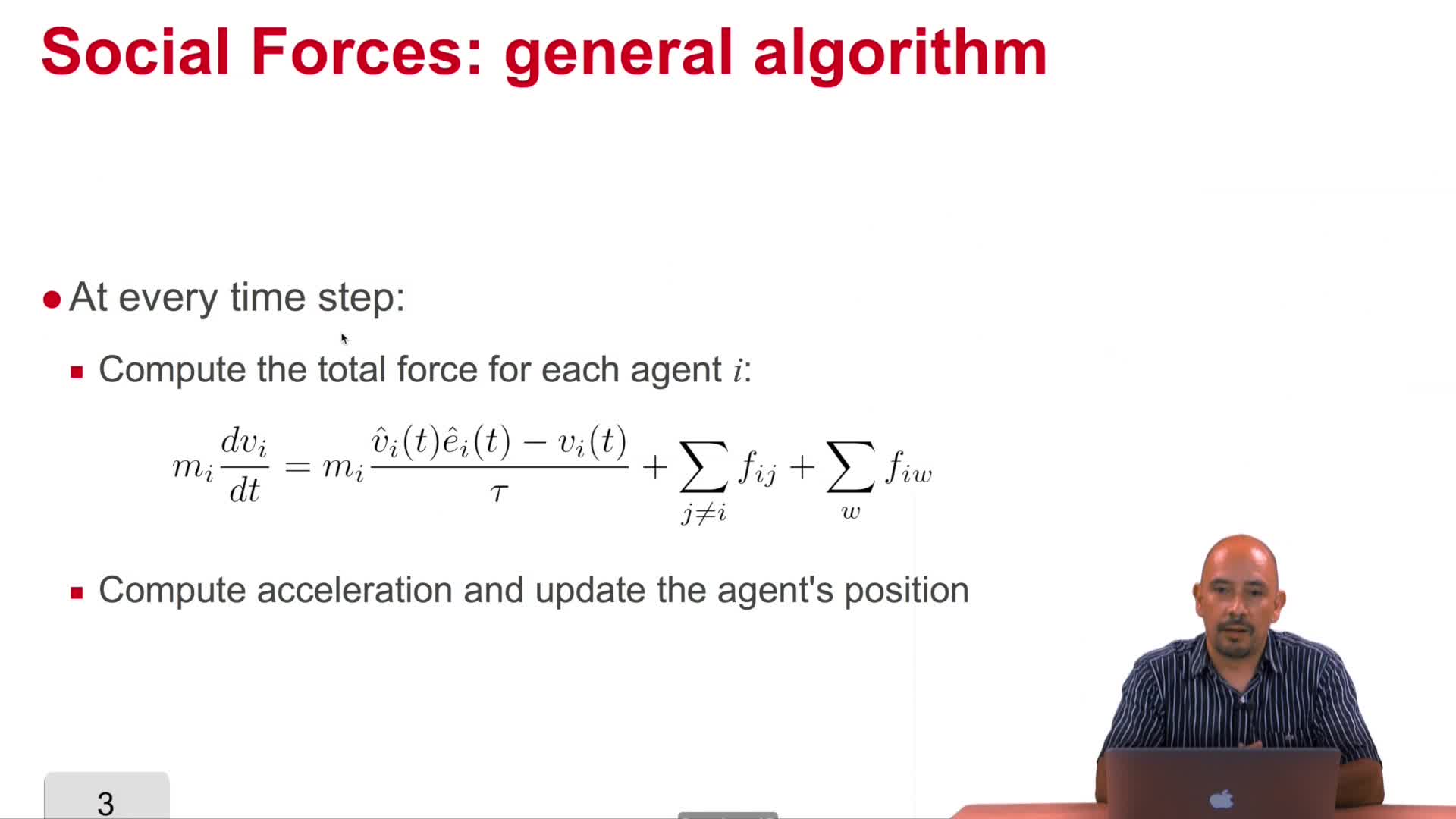
5.8. Other approaches: Social Forces
In this video we will review one of the alternatives we are proposing to the use of Hidden Markov models and typical trajectories: the Social Force model.

5.3b. Learning typical trajectories 2/2
In this video we are aiming to improve on the results we obtained in video 5.3a, in particular with respect to the greyed-out trajectories that are badly represented.
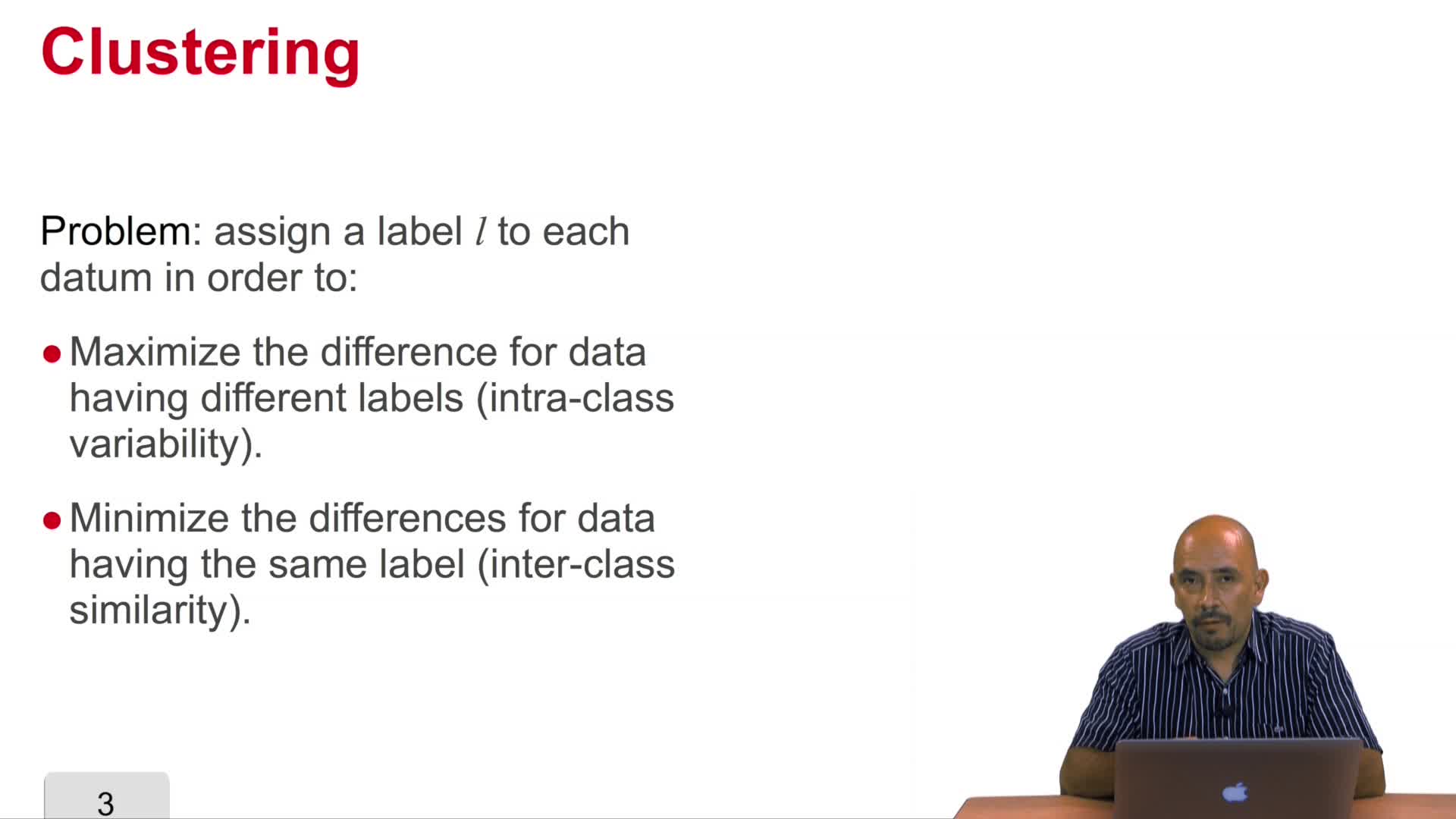
5.2. Expectation-Maximization Clustering
In this video, we are going to start working towards building a motion model.
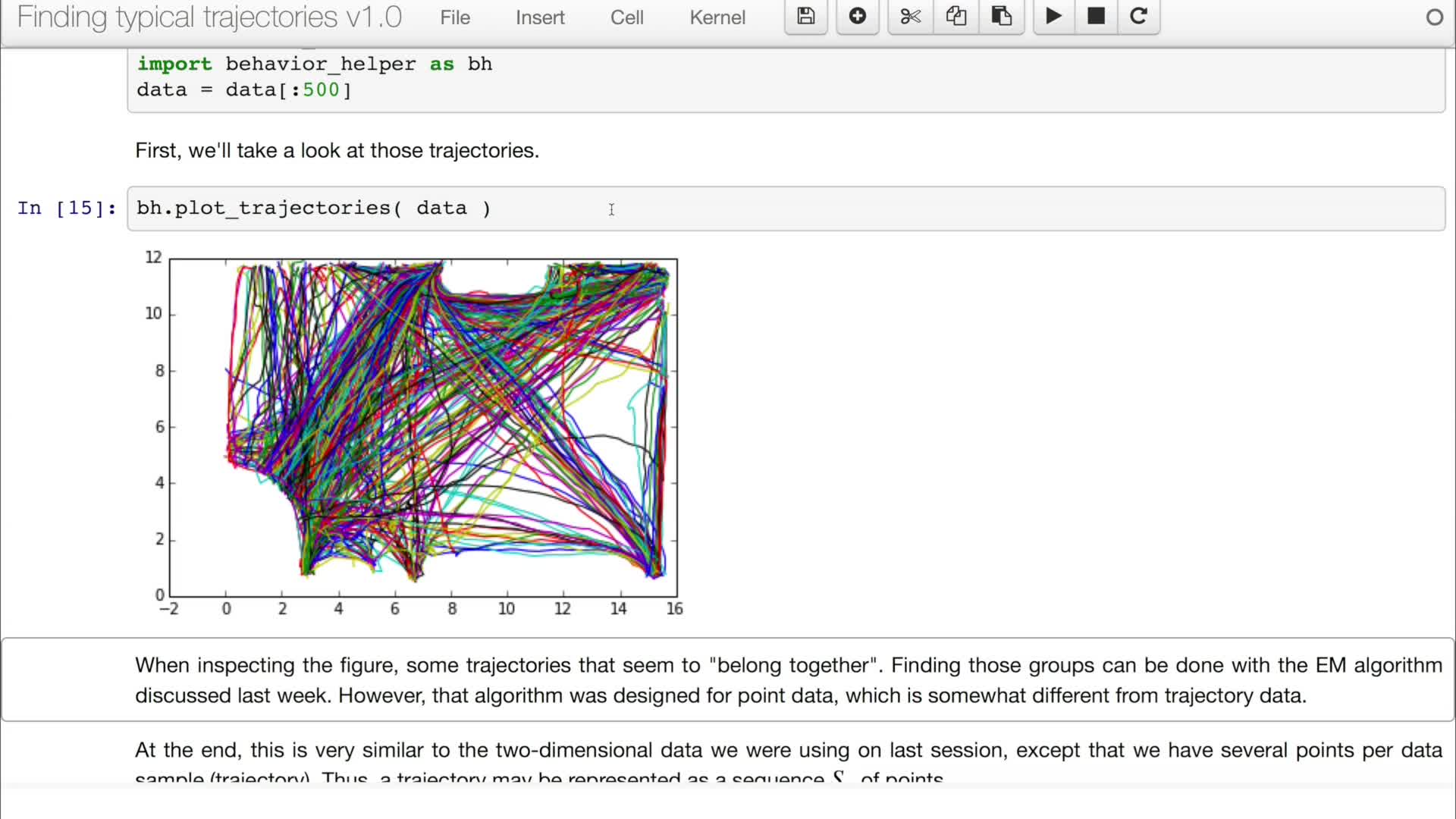
5.3a. Learning typical trajectories 1/2
In video 5.2 we showed how to apply the expectation maximization clustering algorithm to two-dimensional data. In this video we will learn how to apply it to trajectory data. And then we will be
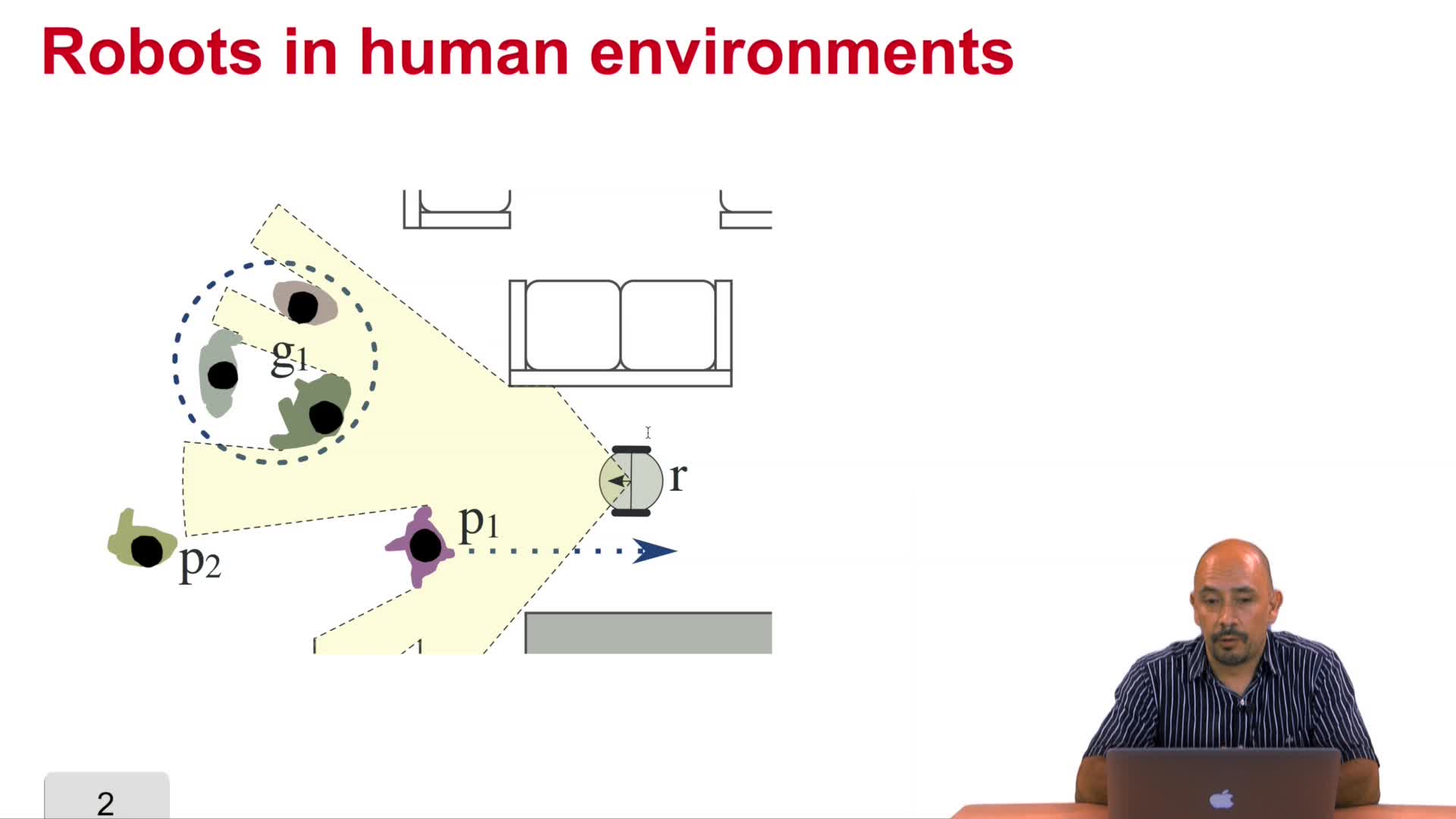
5.1. Introduction
In this part of the course we are going to go deeper into situation awareness and in particular we are going to study how to model and learn human behavior which is a crucial task for social-aware