1.8. Intelligent Vehicles: Context and State of the Art
Laugier
Christian
This video introduces intelligent vehicles and presents more specifically the context and a state of the art.
Mon compte
Pas encore inscrit ?
This video introduces intelligent vehicles and presents more specifically the context and a state of the art.
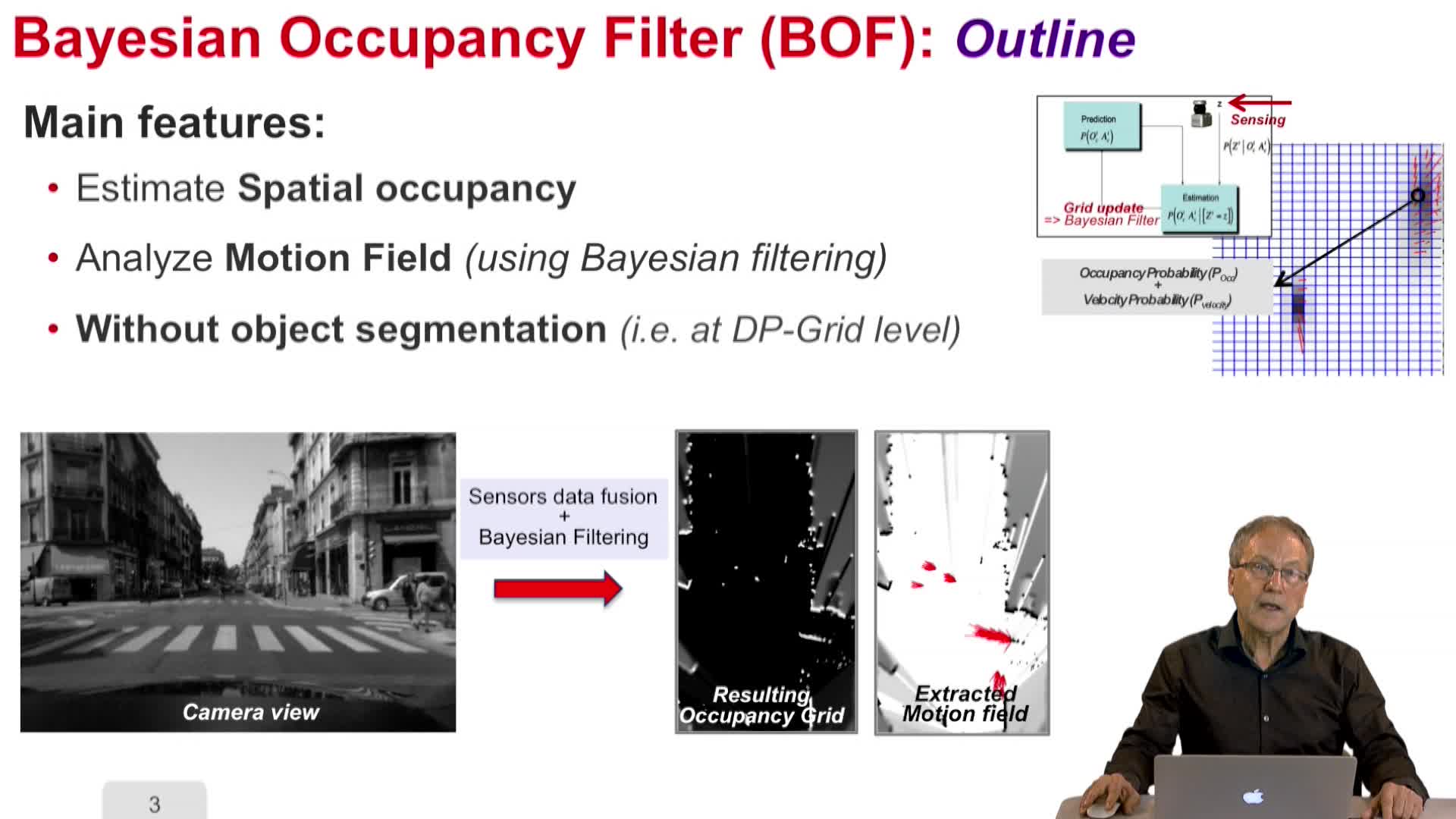
This video will show how to describe Bayesian occupancy filter concept.
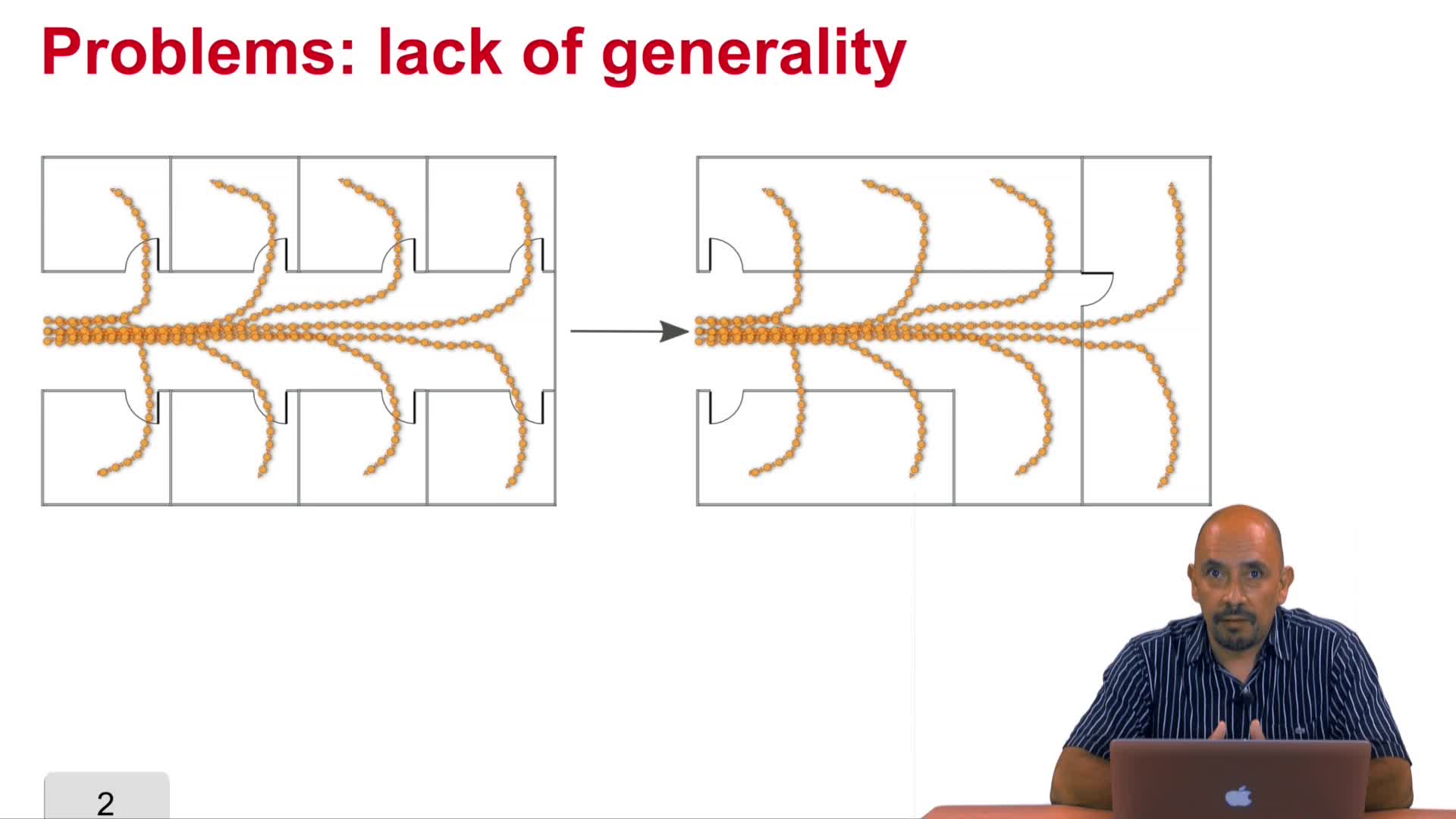
In previous videos we have discussed how to implement the typical trajectories and motion patterns approach. In this video we are going to discuss what are the drawbacks of such an approach,
This video presents the technical challenges and driving skills for intelligent vehicles.
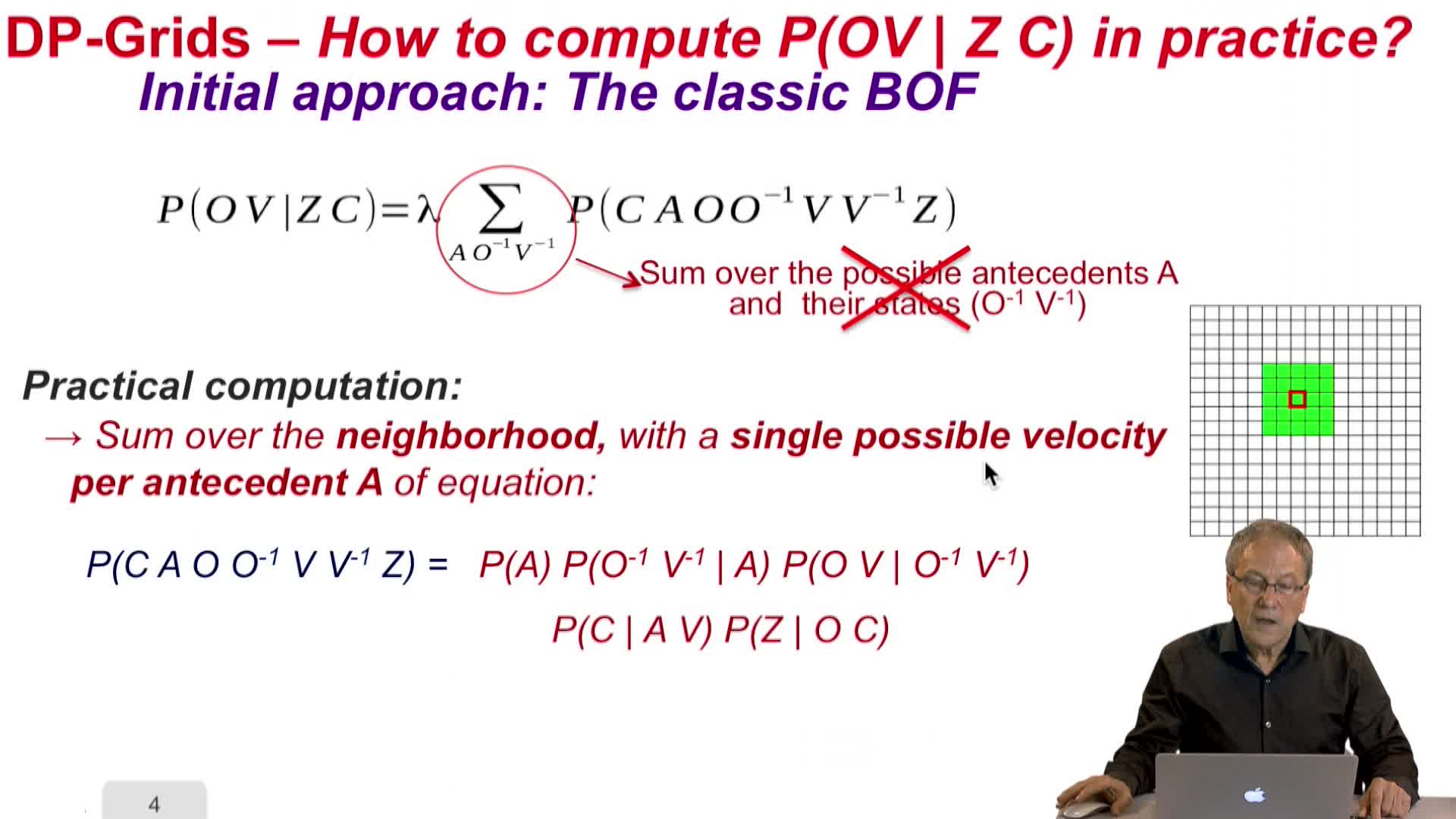
This video addresses the problem of the practical implementation for the dynamic probabilistic grid.
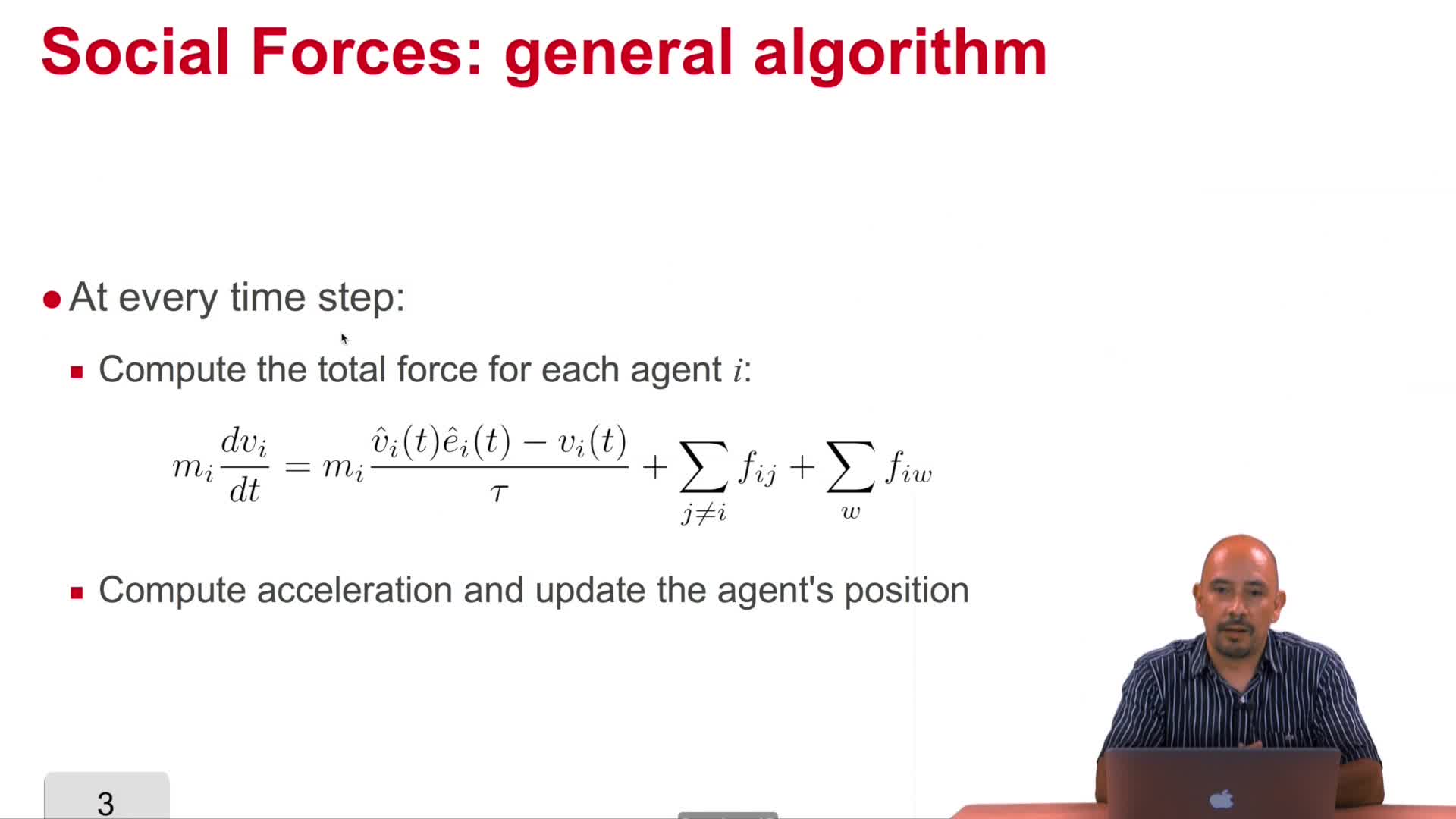
In this video we will review one of the alternatives we are proposing to the use of Hidden Markov models and typical trajectories: the Social Force model.
In this part, we will talk about localization which is a fundamental problem that a robot has to be able to solve in order to accomplish almost any tasks. In particular, we will start by
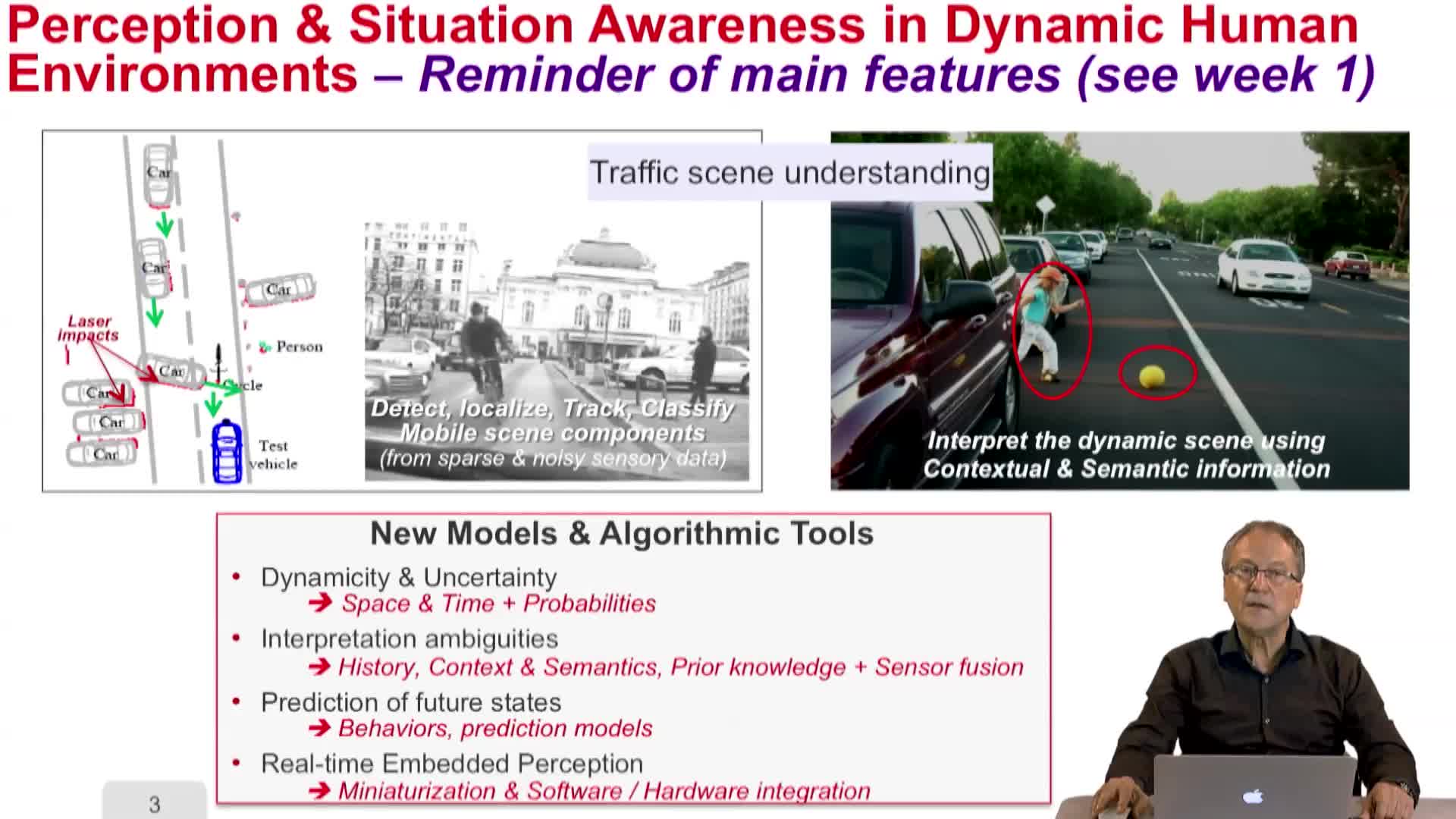
The fourth part of the course addresses perception, situation awareness and decision making. In this first video, we're giving an outline of the problem and introducing the new concept of dynamic
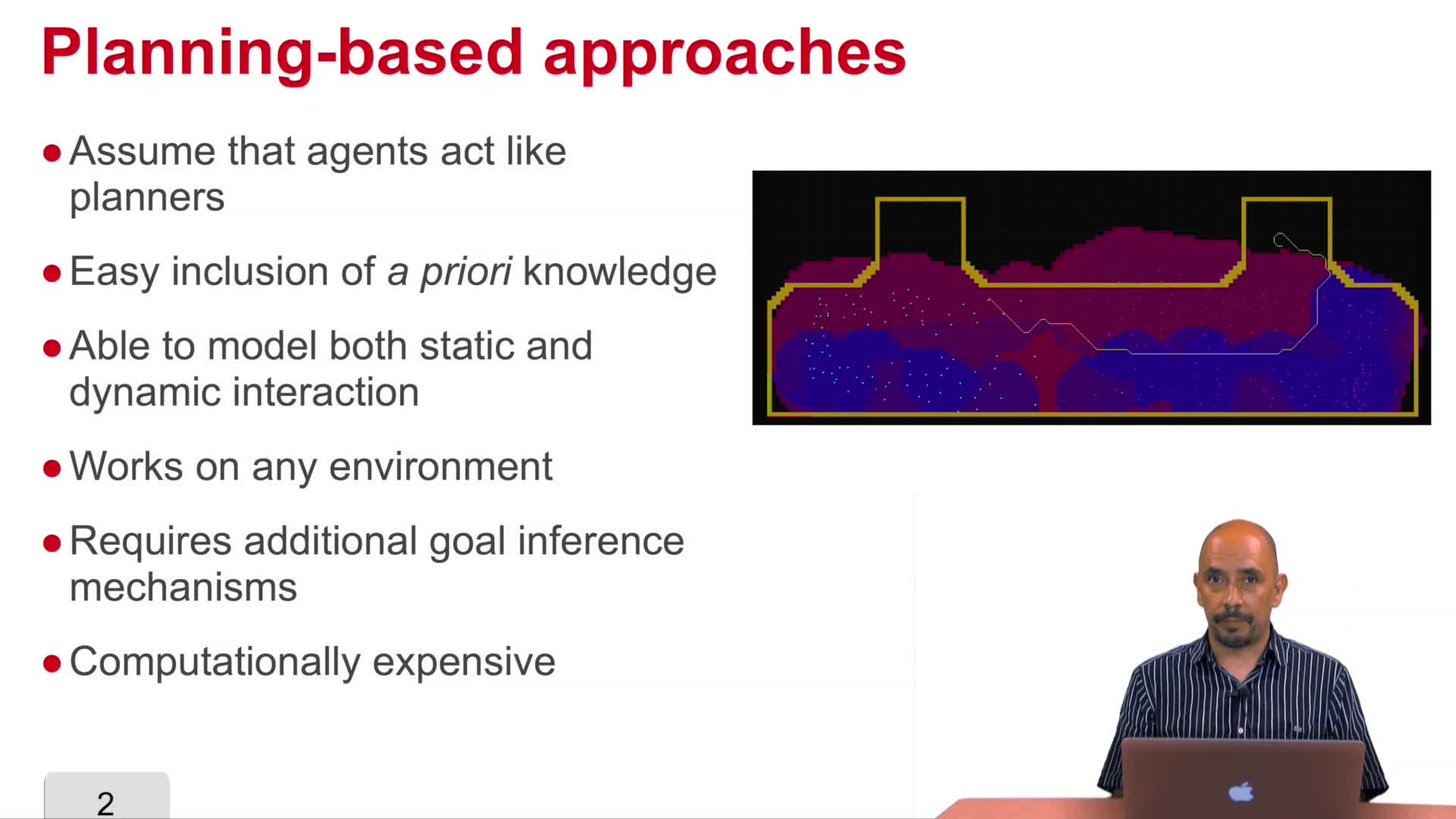
In this video we are going to study a second, and probably the most promising alternative for motion prediction: planning-based algorithms.
Before deriving the equations of the Bayes filter, I want to remind you a few concepts in the theory of probability, and also some mathematical characterization for the statistical error of the
This video is dedicated to the object level perception functions: Simultaneous Localization Mapping (SLAM) and Detection and Tracking surrounding Mobile Objects (DATMO).
Now that we have the equations of the Bayes filter, we need a method in order to implement in real cases these equations. So, in the following, I want to discuss two methods, which are commonly