Mobile Robots and Autonomous Vehicles
Description
Mobile Robots are increasingly working in close interaction with human beings in environments as diverse as homes, hospitals, public spaces, public transportation systems and disaster areas. The situation is similar when it comes to Autonomous Vehicles, which are equipped with robot-like capabilities (sensing, decision and control). Such robots must balance constraints such as safety, efficiency and autonomy, while addressing the novel problems of acceptability and human-robot interaction. Given the high stakes involved, developing these technologies is clearly a major challenge for both the industry and the human society.
The objective of this course is to introduce the key concepts required to program mobile robots and autonomous vehicles. The course presents both formal and algorithmic tools, and for its last part's topics (behavior modeling and learning), it will also provide realistic examples in Python. This course is designed around a real-time decision architecture using Bayesian approaches. It covers topics such as:
- Sensor-based mapping and localization: presentation of the most popular methods to perform robot localization, mapping and to track mobile objects.
- Fusing noisy and multi-modal data to improve robustness: introduction of both traditional fusion methods as well as more recent approaches based on dynamic probabilistic grids.
- Integrating human knowledge to be used for scene interpretation and decision making: discussion on how to interpret the dynamic scene, predict its evolution, and evaluate the risk of potential collisions in order to take safe and efficient navigation decisions.
TARGETED AUDIENCE
The course is primarily intended for students with an engineering or masters degree, but any person with basic familiarity with probabilities, linear algebra and Python can benefit from it.
The course can also complement the skills of engineers and researchers working in the field of mobile robots and autonomous vehicles.
PRE-REQUISITES
Basic notions of robotics, probabilities, linear algebra and Python (only for part 5).
COURSE SYLLABUS
Click on a link below to access the videos of the course.
Part 1: Objectives, Challenges, State of the Art
Part 2: Bayes and Kalman Filters
Part 3: Extended Kalman Filters
Part 4: Perception and Situation Awareness and Decision Making
Part 5: Behavior Modeling and Learning
The material of this course come from a MOOC delivered on France Université Numérique : https://www.fun-mooc.fr/courses/inria/41005S02/session02/about
Collections
8 vidéos
2. Bayes and Kalman Filters
MARTINELLI Agostino
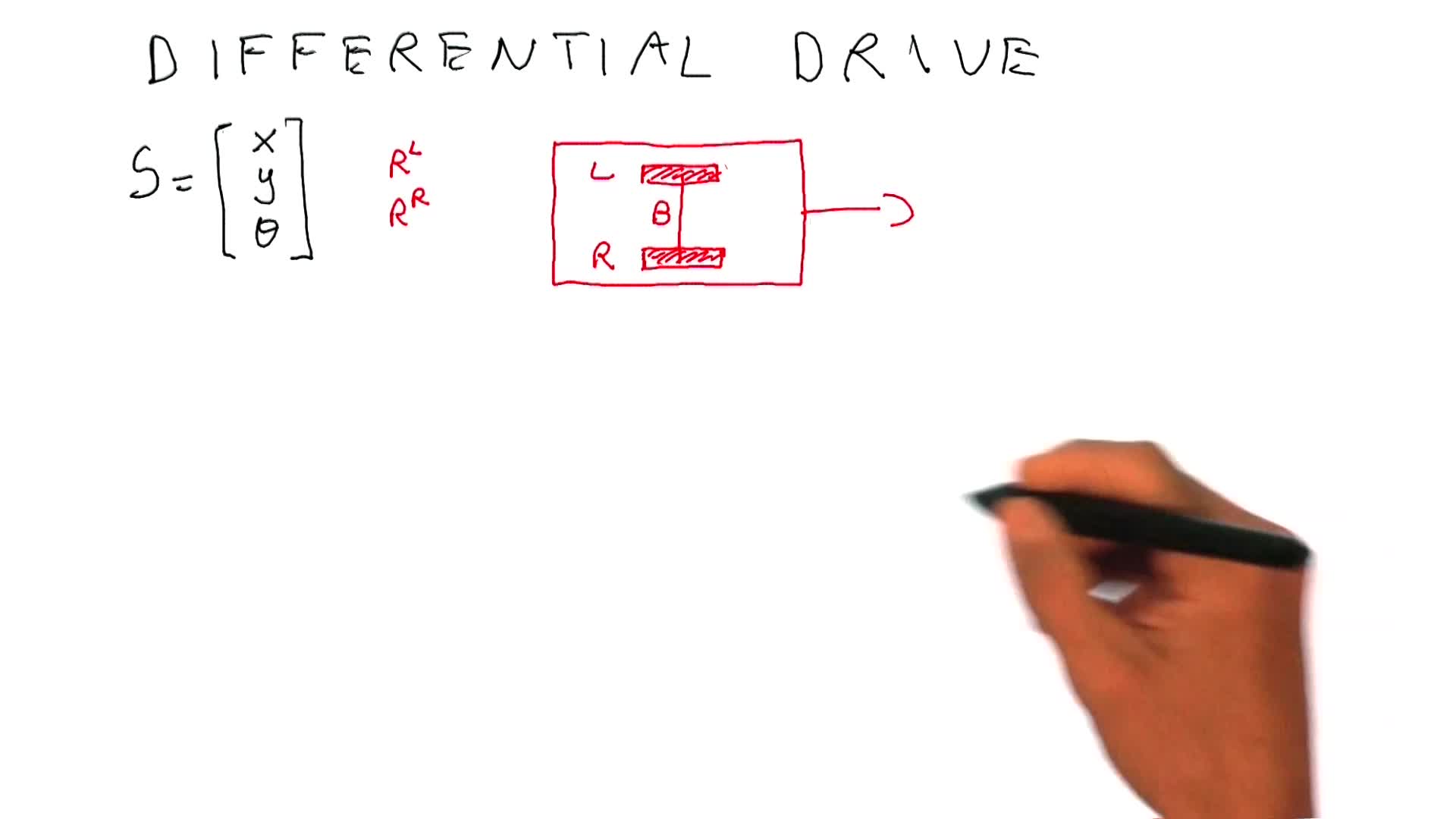
Contents of this second part: 2.1. Localization process in a probabilistic framework: basic concepts 2.2. Characterization of proprioceptive and exteroceptive sensors 2.3. Wheel encoders for a differential drive vehicle 2.4. Sensor statistical models 2.5. Reminds on probability 2.6. The Bayes Filter 2.7. Grid Localization: an example in 1D 2.8. The Extended Kalman Filter (EKF)
01.06.2015
- niveau 1 niveau 2 niveau 3
- document 1 document 2 document 3

10 vidéos
1. Objectives, Challenges, State of the Art
LAUGIER Christian
Objectives, Challenges, State of the Art
01.06.2015
- niveau 1 niveau 2 niveau 3
- document 1 document 2 document 3