1. Objectives, Challenges, State of the Art

Descriptif
Contents of this first part:
1.0. Introduction
1.1. Socio-economic context
1.2. Technological evolution of Robotics & State of the Art
1.3. New challenges for Robotics in Human Environments
1.4. Decisional & Control Architecture for Autonomous Mobile Robots & IV
1.5. Sensing technologies: Object Detection
1.6. Sensing technologies: Robot Control & HRI
1.7. Basic technologies for Navigation in Dynamic Human Environments
1.8. Intelligent Vehicles: Context & State of the Art
1.9. Intelligent Vehicles: Technical Challenges & Driving Skills
Vidéos
1.0. Introduction
The objective of this course is to show how to program the new generation of mobile robots. The course is primarily intended to students with engineering or Masters Degree, but any person with a
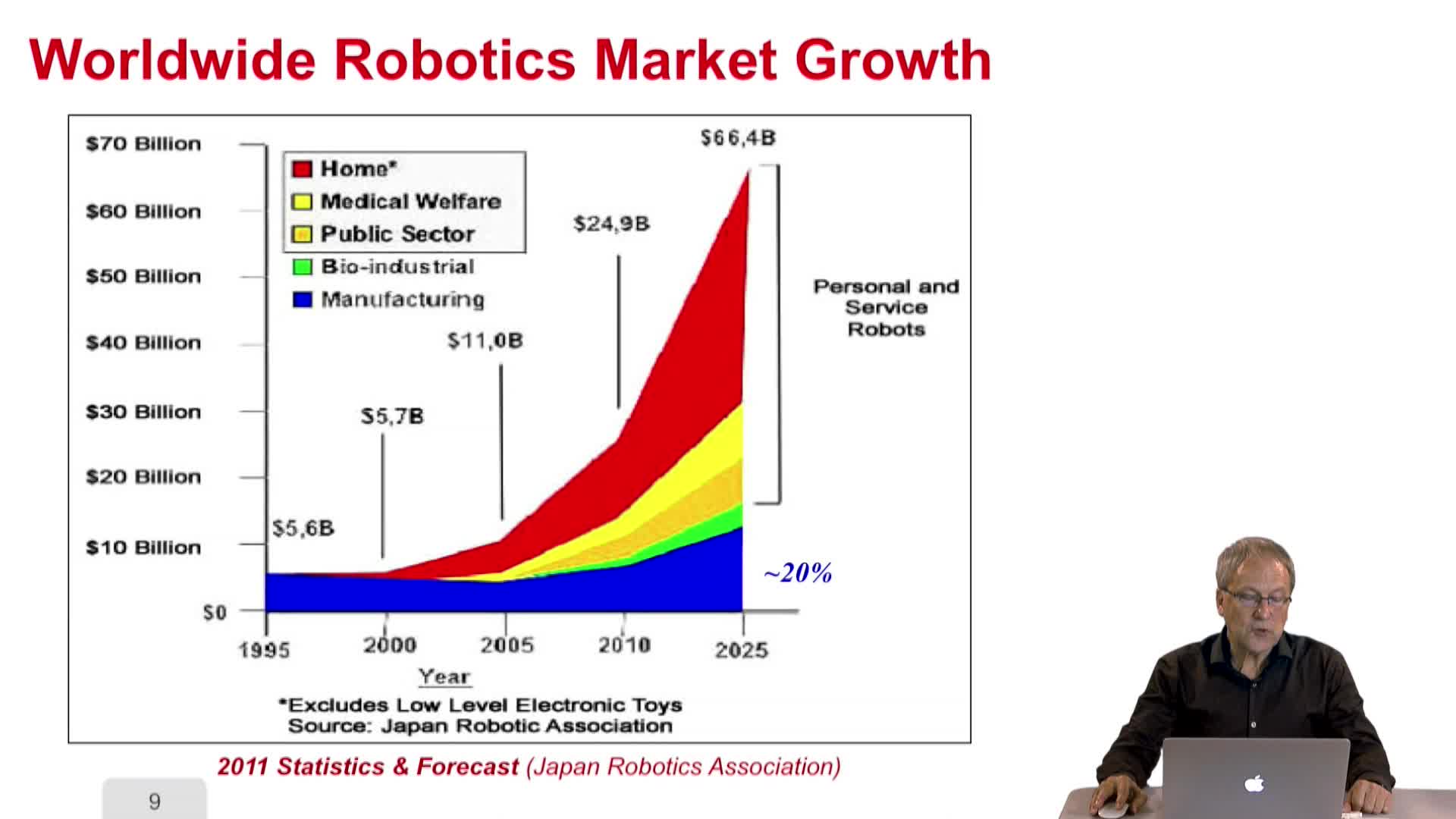
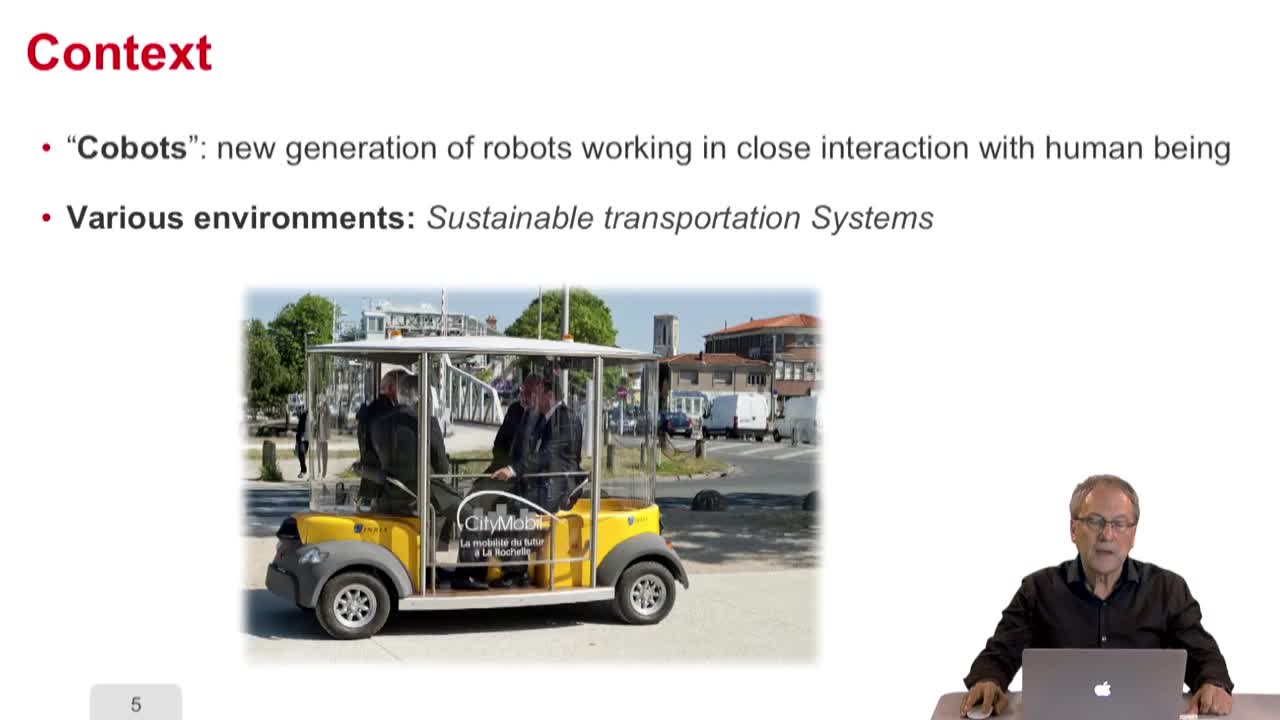
1.1. Socio-economic context
This is the first lesson of the course on mobile robots and autonomous vehicles. It addresses the objectives, the challenges, the state of the art and the technologies.
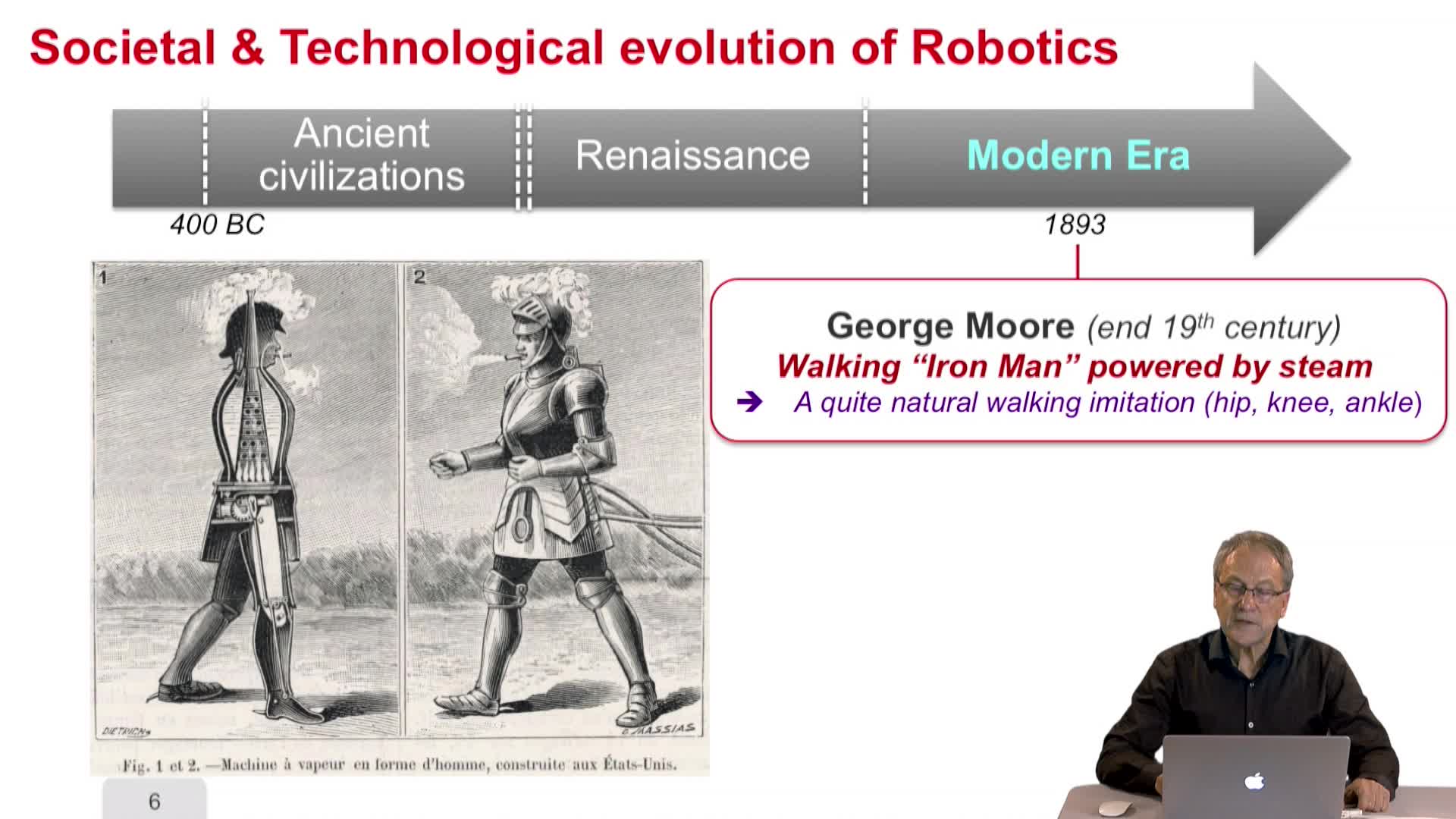
1.2. Technological evolution of Robotics and State of the Art
This video deals with technological evolutions of robotics and state of the art.
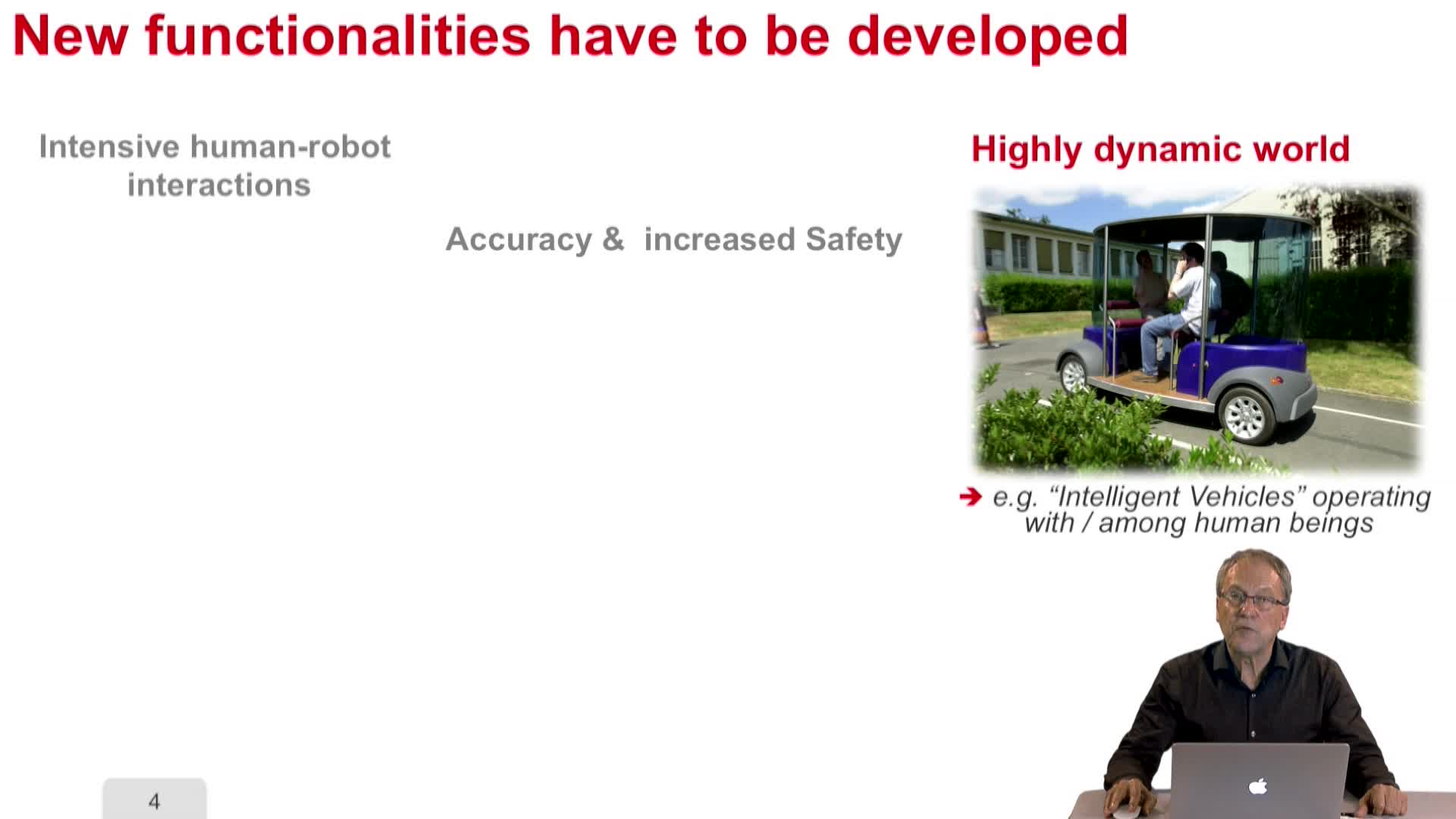
1.3. New challenges for Robotics in Human Environments
Introducing robots in human environments bring new challenges to robotics.
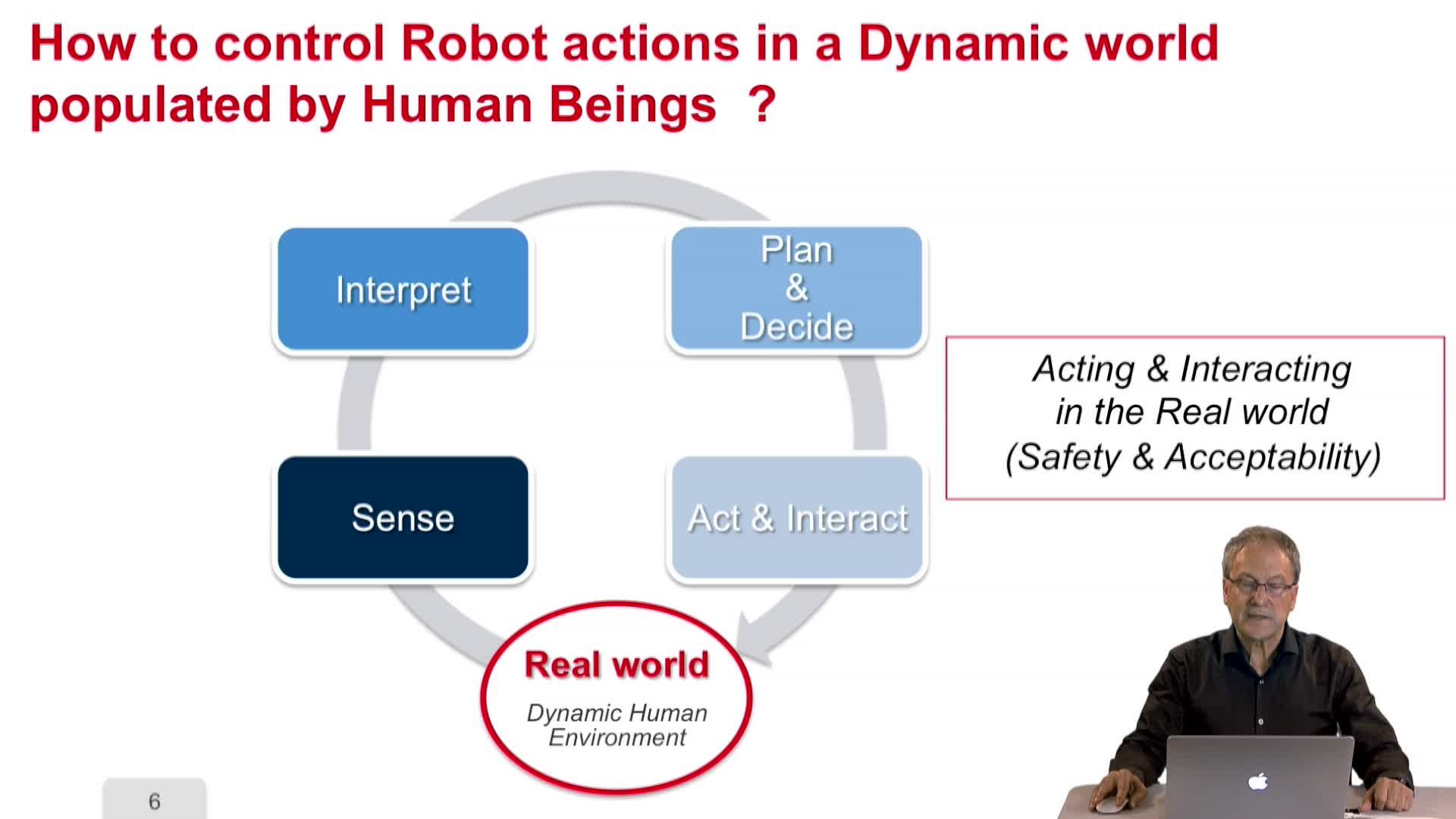
1.4. Decisional and Control Architecture for Autonomous Mobile Robots and IV
This video is presenting the decision and control architecture for autonomous mobile robots and intelligent vehicles. The question is how to control robot action in a dynamic world populated by
1.5. Sensing technologies: Object Detection
This video addresses sensing technologies. Sensing technologies is one of the key functions for autonomous robots. Sensing is performed using various internal and external sensors.
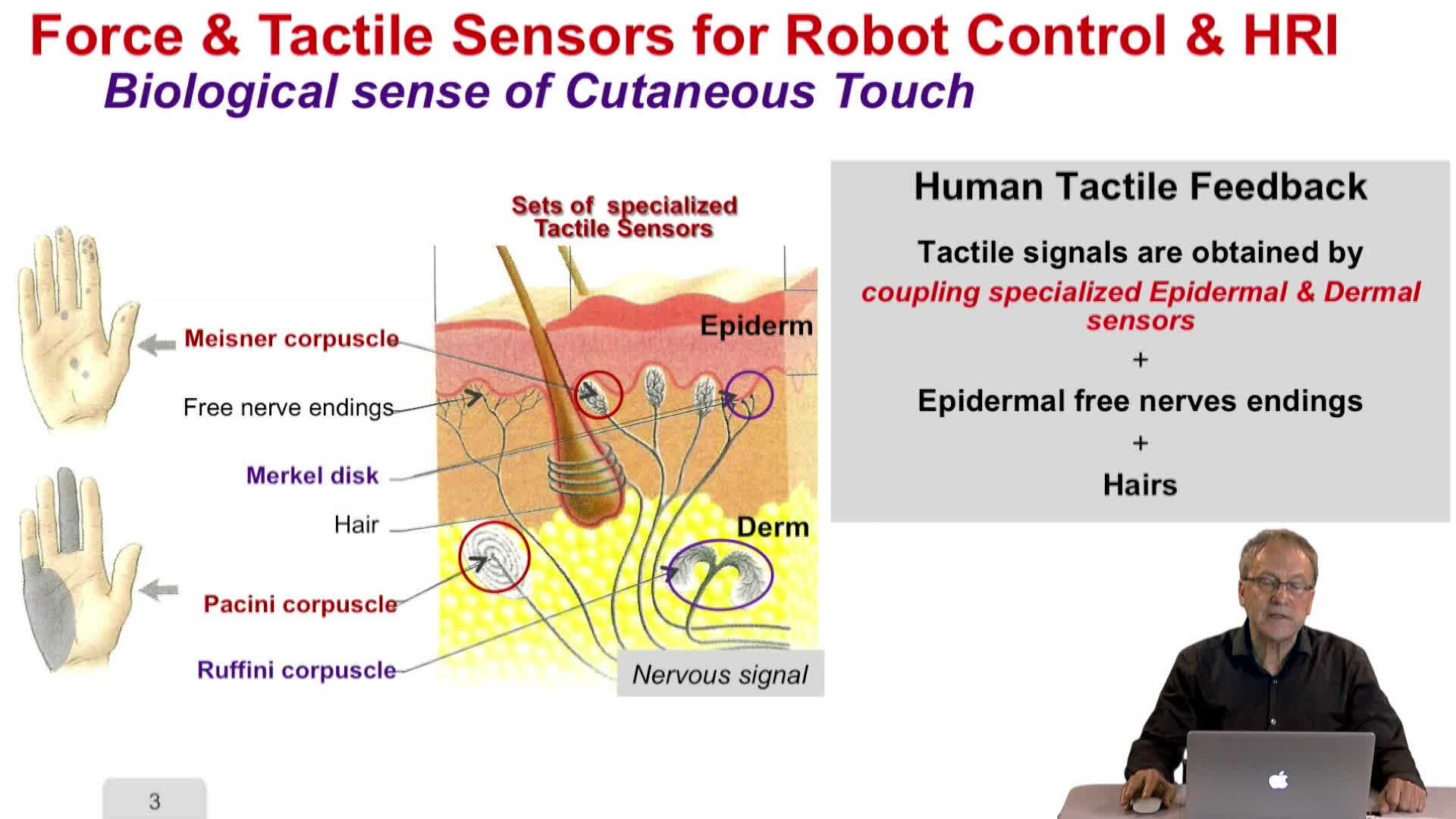
1.6. Sensing technologies: Robot Control and HRI
This video addresses sensing technology, and focuses on robot control and human-robot interaction applications.
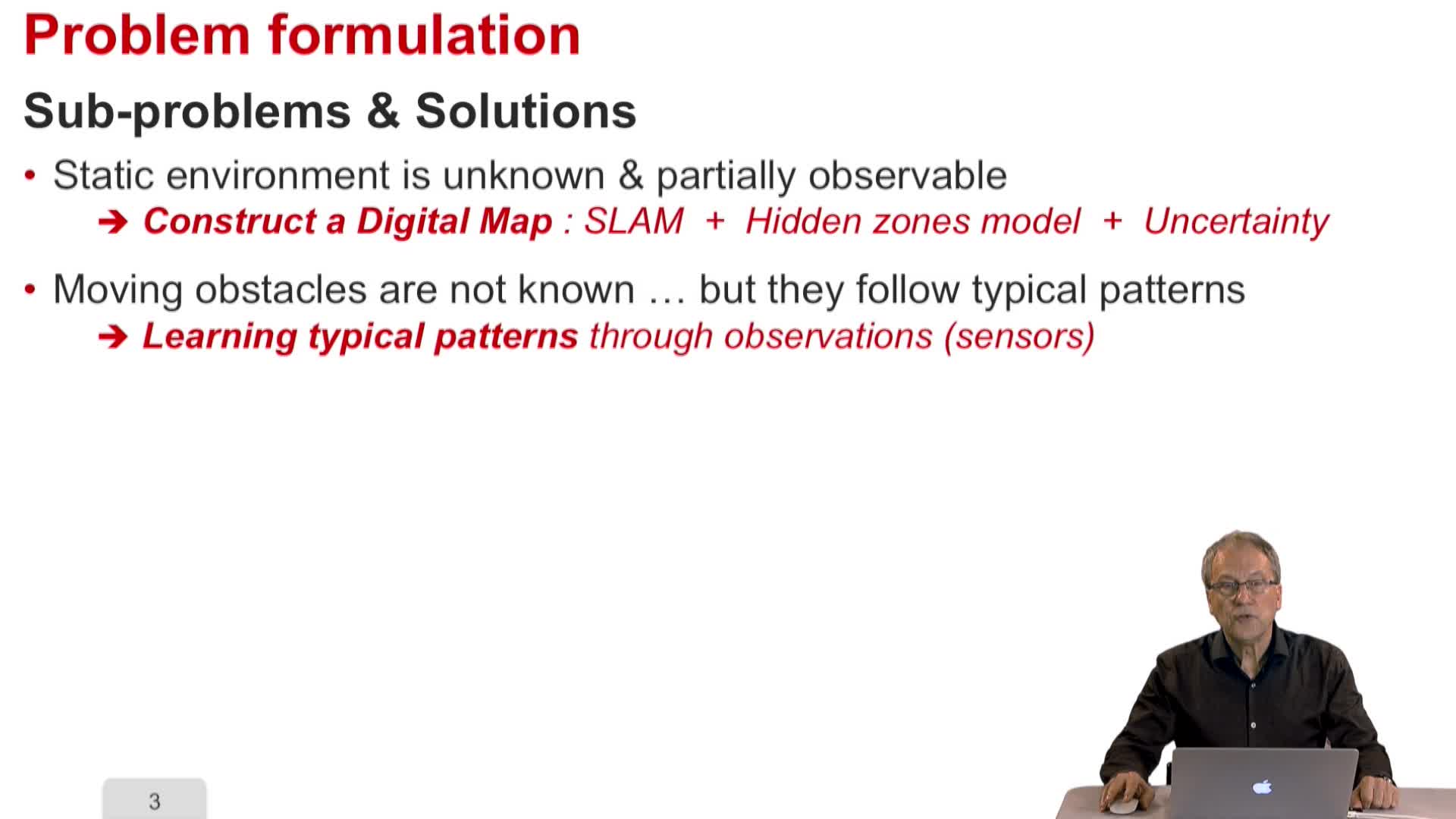
1.7. Basic technologies for Navigation in Dynamic Human Environments
This video presents the basic technologies for navigation in dynamic human environments. The objective is to achieve goal oriented navigation in open, dynamic and uncertain environments populated
1.8. Intelligent Vehicles: Context and State of the Art
This video introduces intelligent vehicles and presents more specifically the context and a state of the art.

1.9. Intelligent Vehicles: Technical Challenges and Driving Skills
This video presents the technical challenges and driving skills for intelligent vehicles.
Intervenants et intervenantes
Auteur d'une thèse de 3e cycle en informatique (Grenoble 1, 1976) et d'une thèse d'état en sciences (Grenoble INPG, 1987). - Directeur de thèse en informatique et en robotique à Grenoble INPG. Directeur de recherche à l'INRIA Grenoble Rhône-Alpes