2 : Methodological Foundations

Descriptif
In this second part, we will talk about "Methodological Foundations" : Robot heads and acoustic laboratories, Binaural Processing Pipeline, Continuous-time Fourier transform, Discrete-time signals, Spectrogram of an acoustic signal,...
Vidéos
Robot heads and acoustic laboratories
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time Fourier transform 2.5
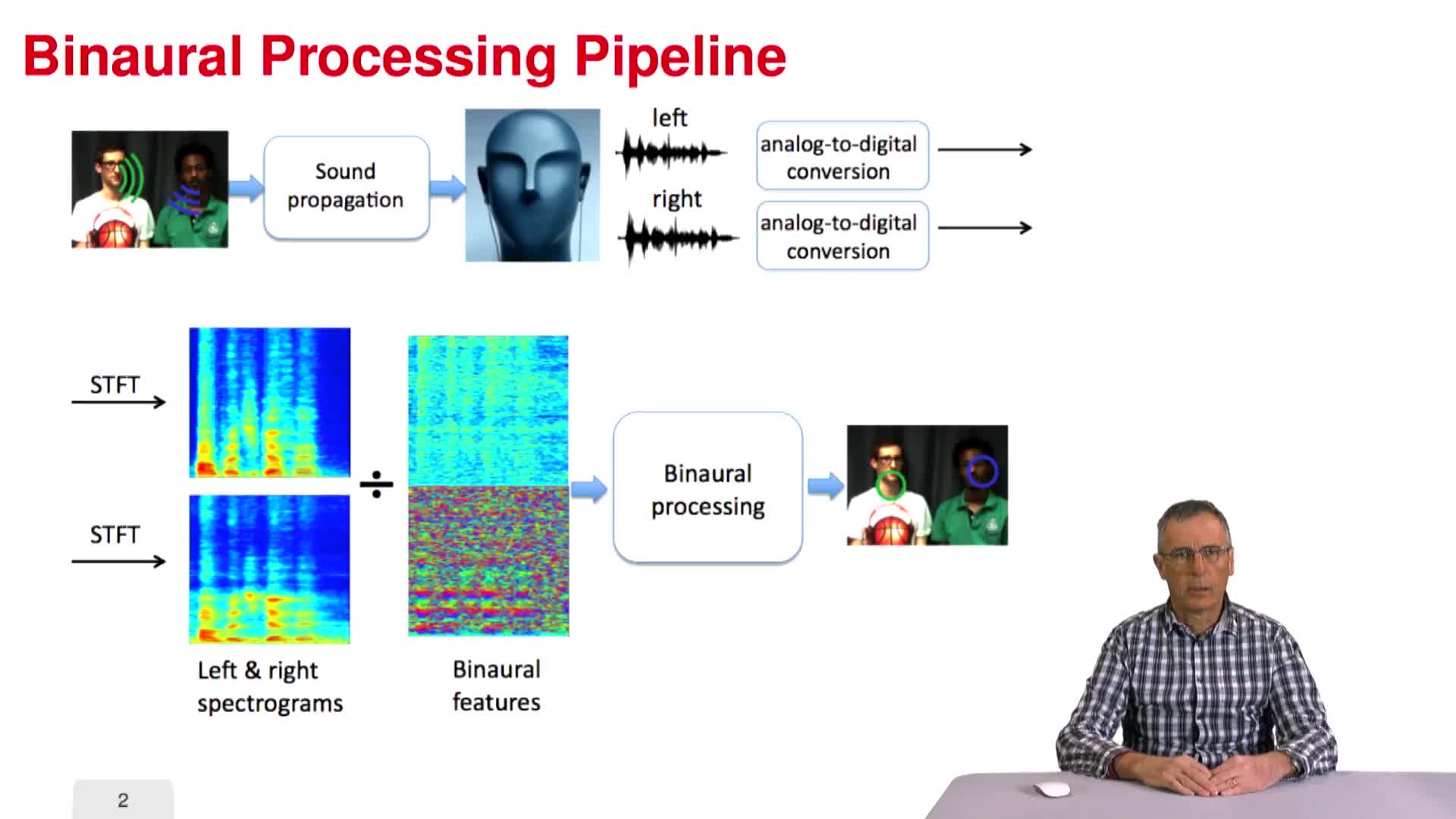
Binaural Processing Pipeline
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time Fourier transform 2
Continuous-time Fourier transform
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Continuous short-time Fourier transform
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Discrete-time signals
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
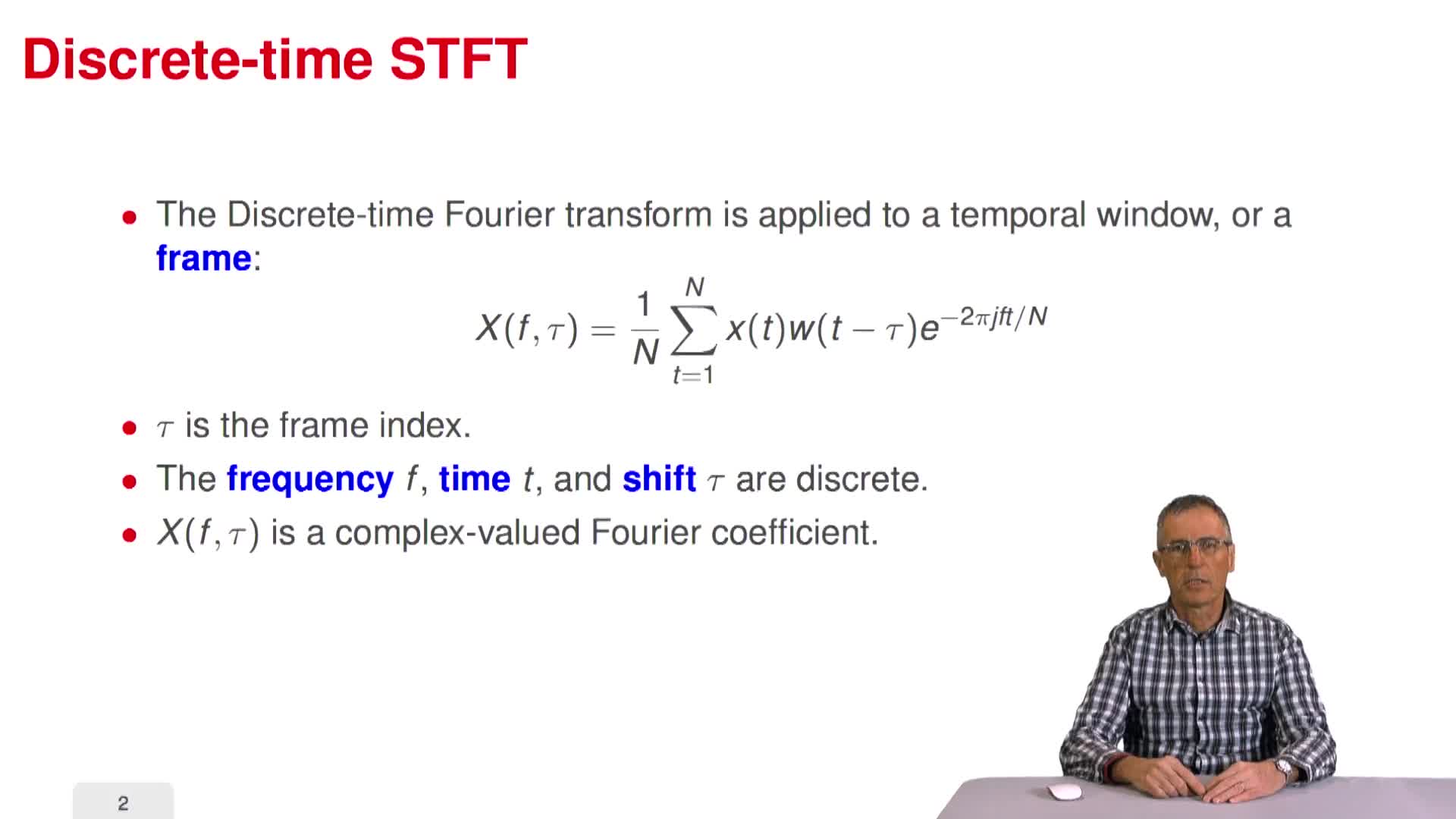
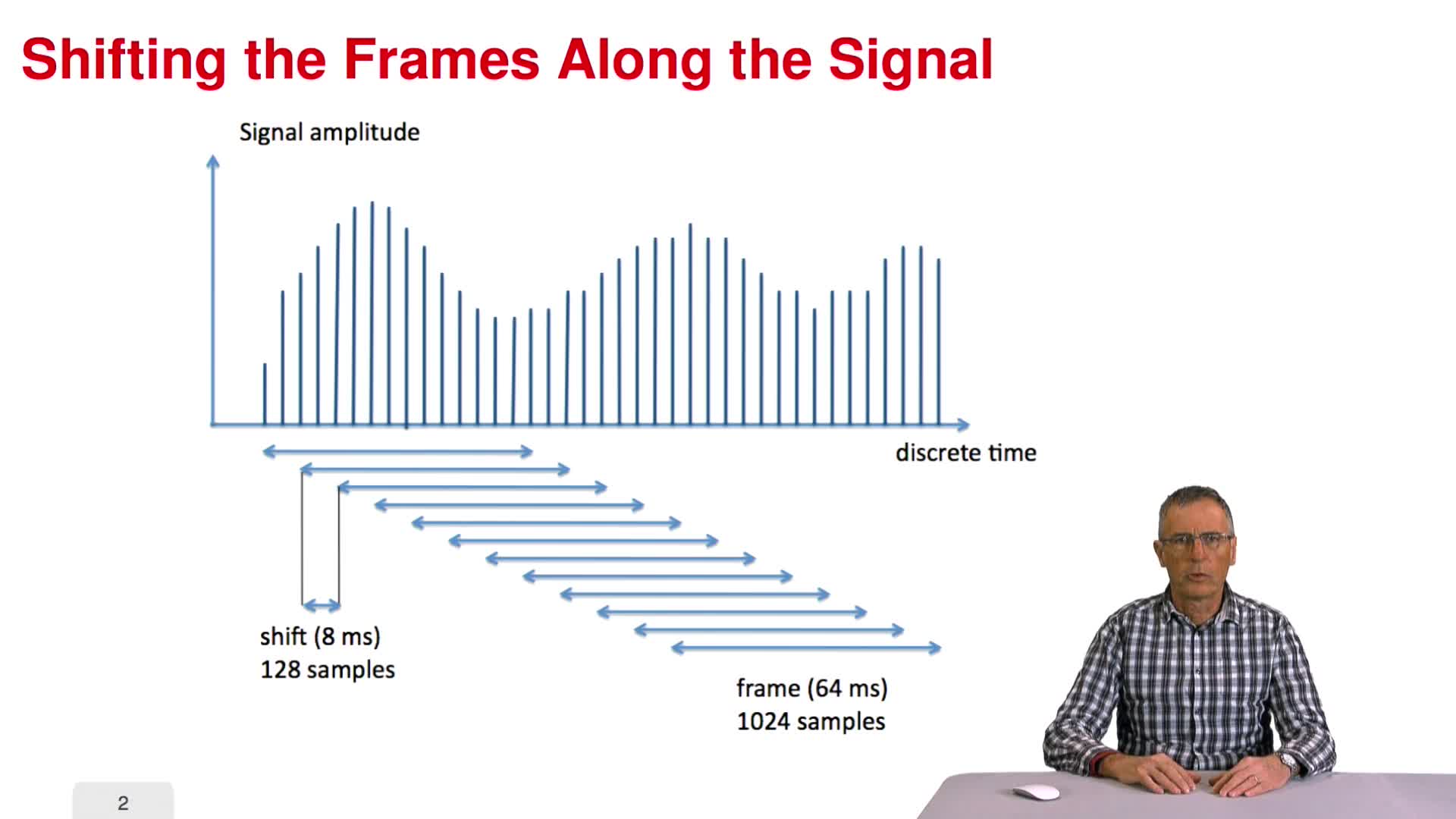
Discrete short-time Fourier transform
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Spectrogram of an acoustic signal
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
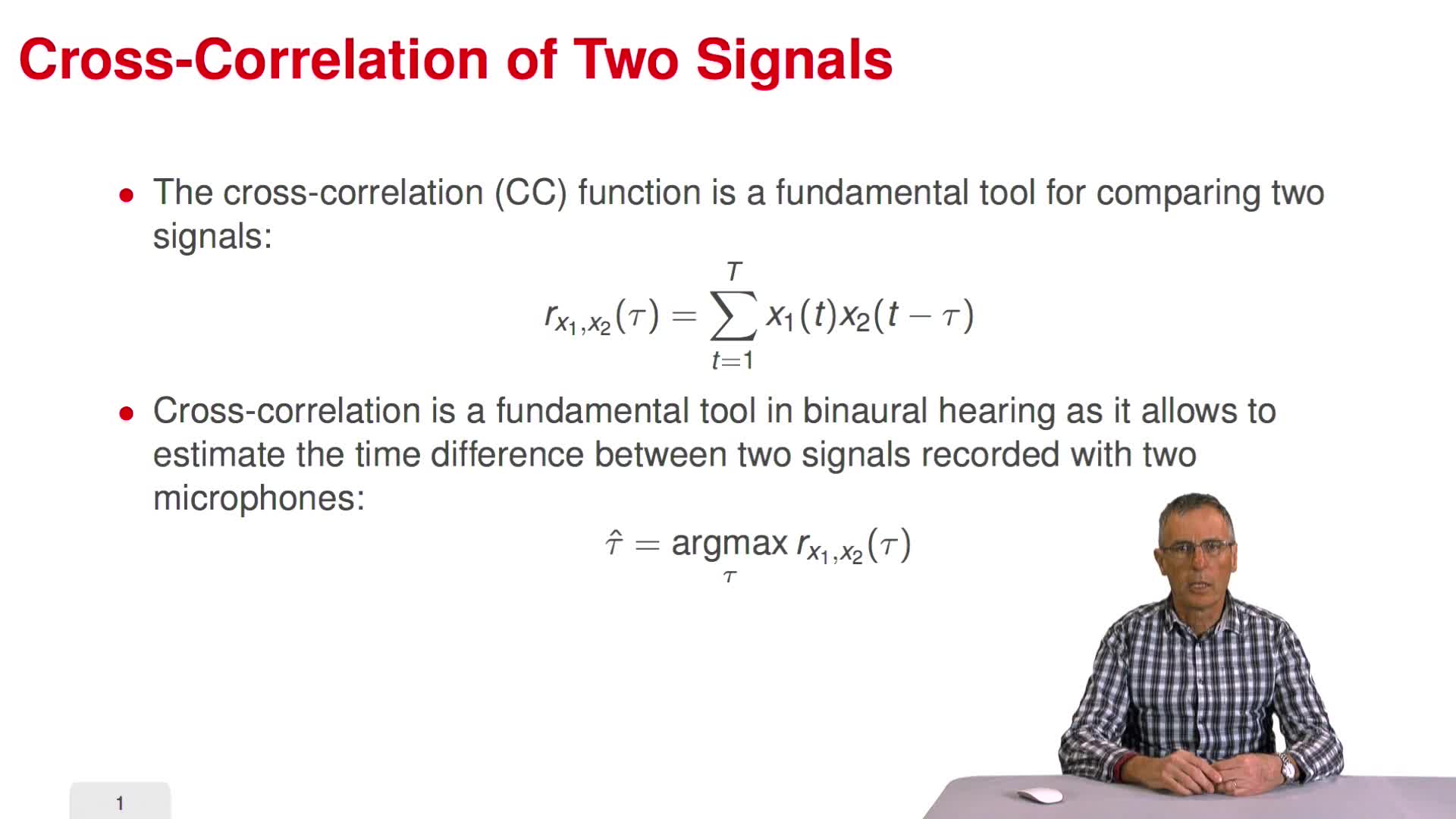
Cross-correlation
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Relative transfer function
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
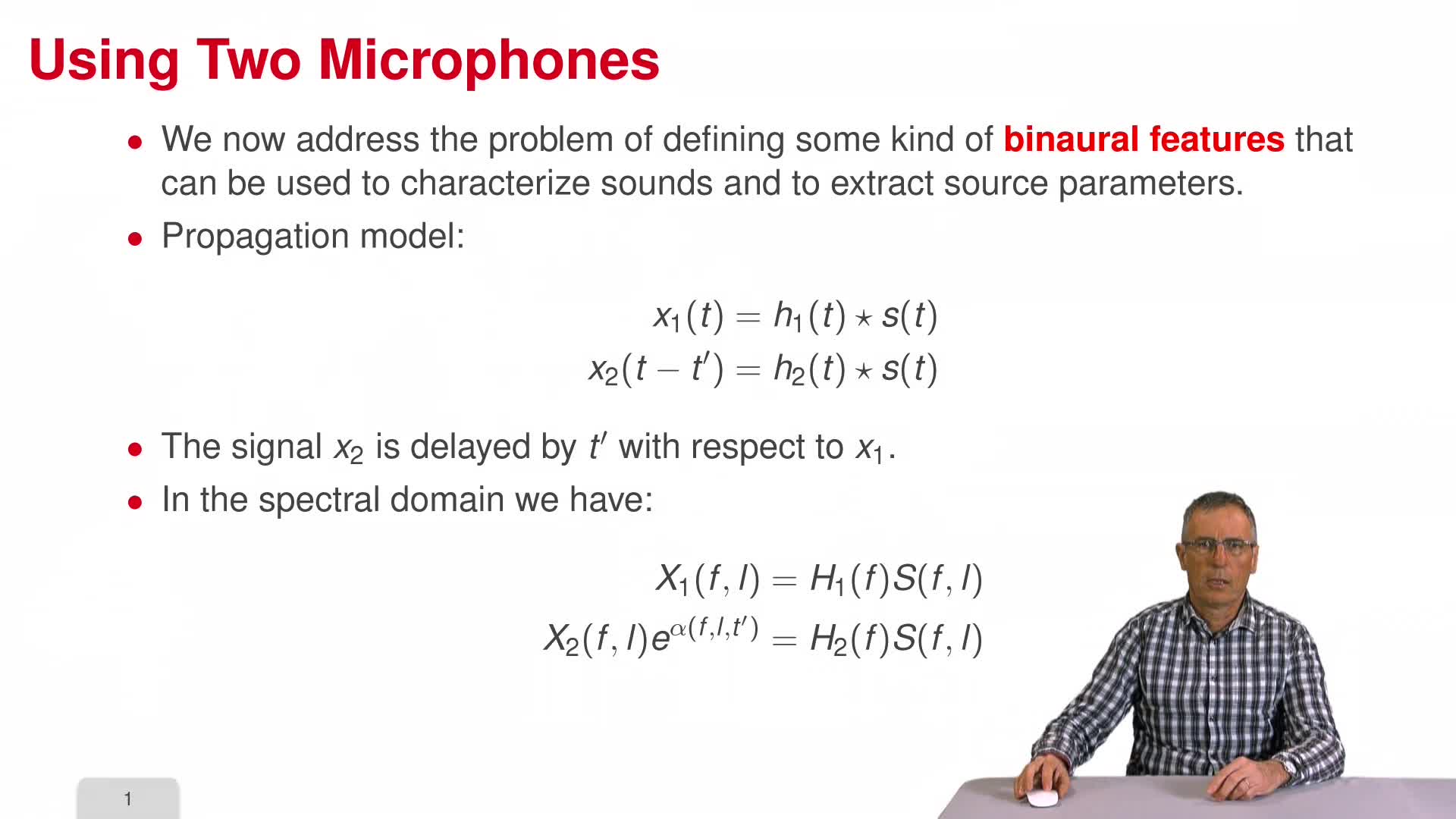
Binaural features
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Intervenants et intervenantes

Auteur d'une thèse de docteur-ingénieur en automatique (Grenoble INPG, 1981). - Directeur de recherche au CNRS, puis à l'INRIA, Laboratoire d'informatique fondamentale et d'intelligence artificielle de l'Institut national polytechnique de Grenoble (en 1993). - Directeur de thèse à l'Université Joseph Fourier de Grenoble et à Grenoble INPG (-1990-1994-). - Consultant