Les capteurs THOË et TRACESENSE
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
Mon compte
Pas encore inscrit ?
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
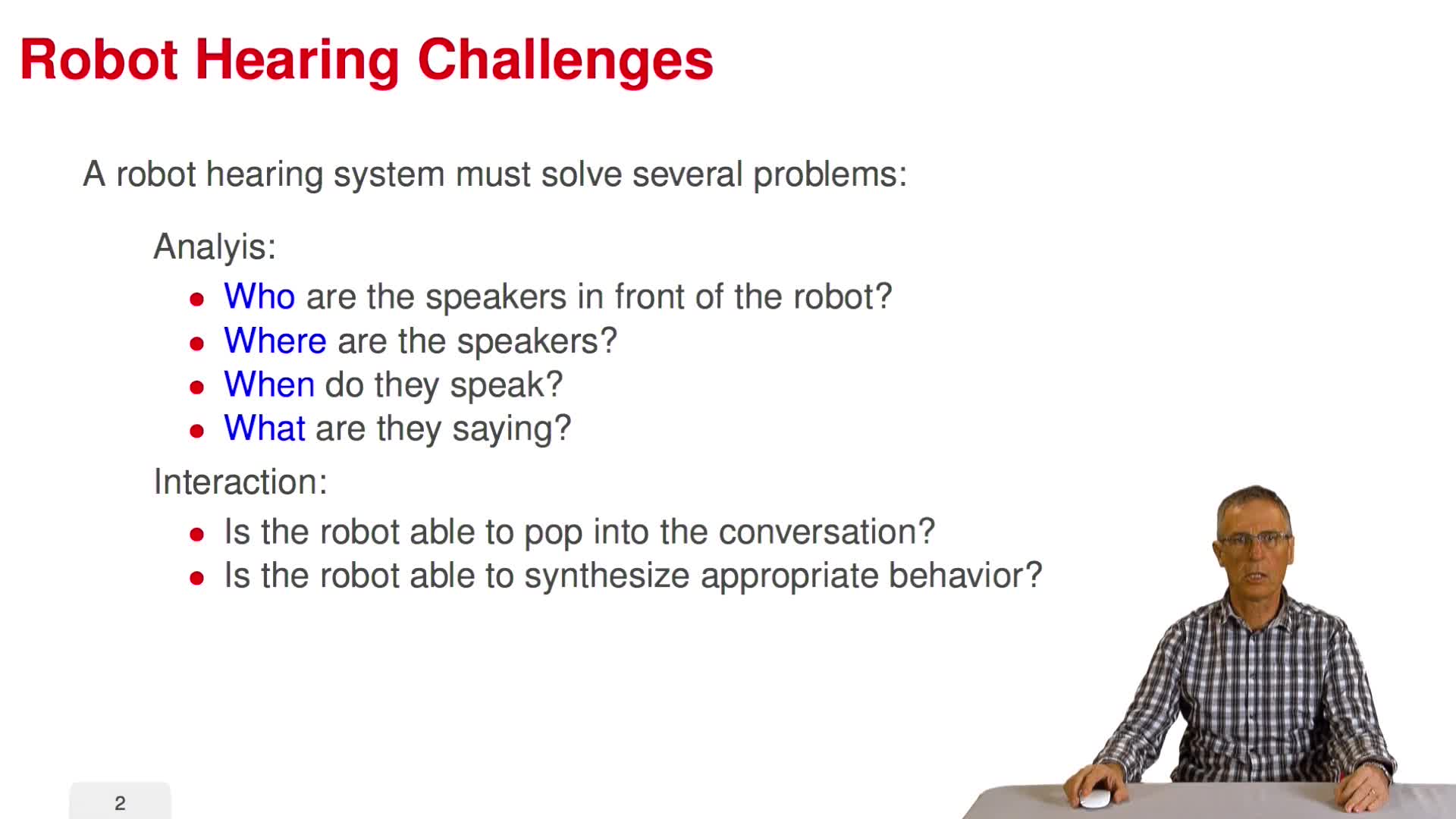
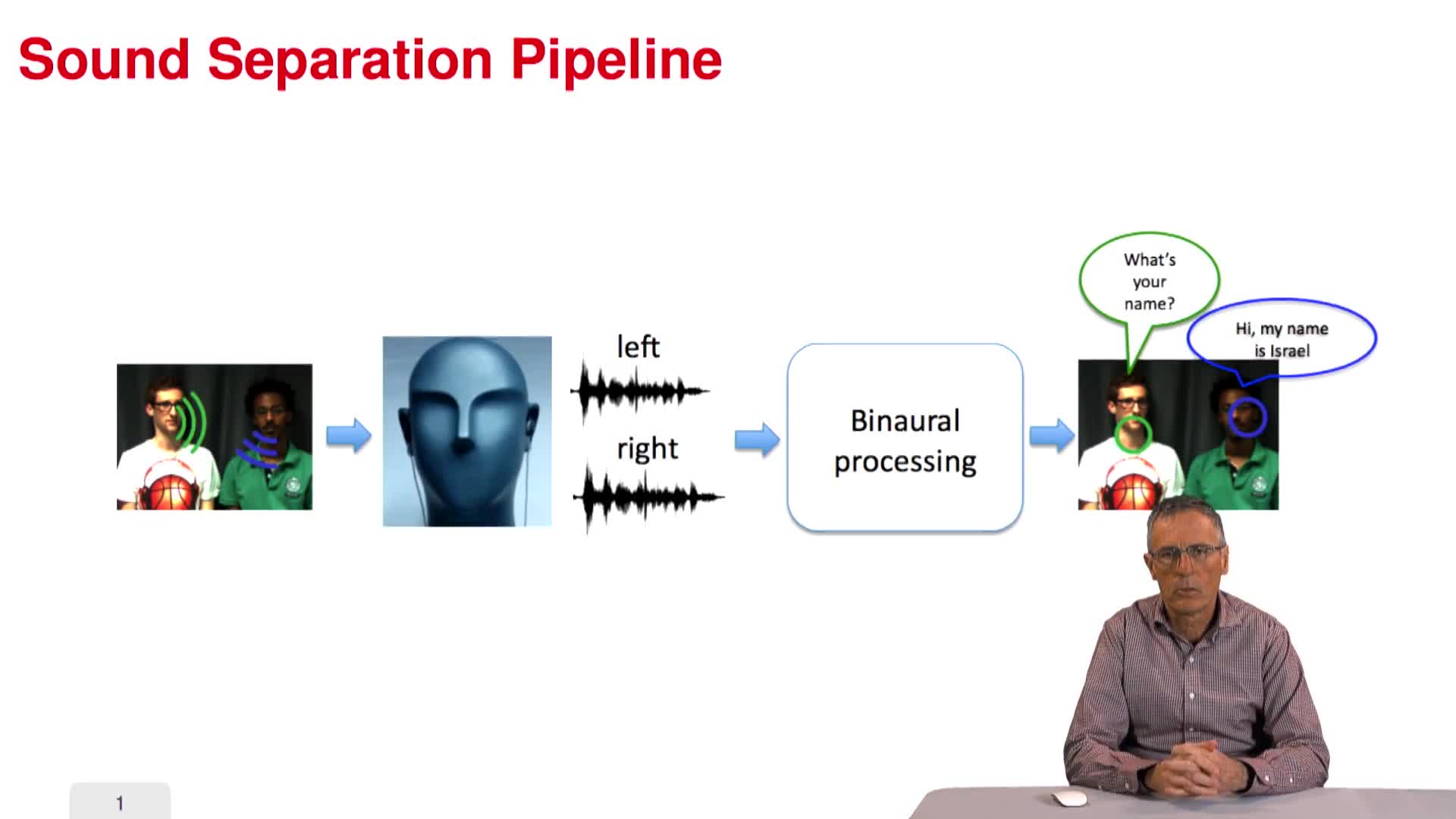
Part 1 : Introduction to Robot Hearing 1.1. Why do robots need to hear? 1.2. Human-robot interaction 1.3. Auditory scene analysis 1.4. Audio signal processing in brief 1.5.
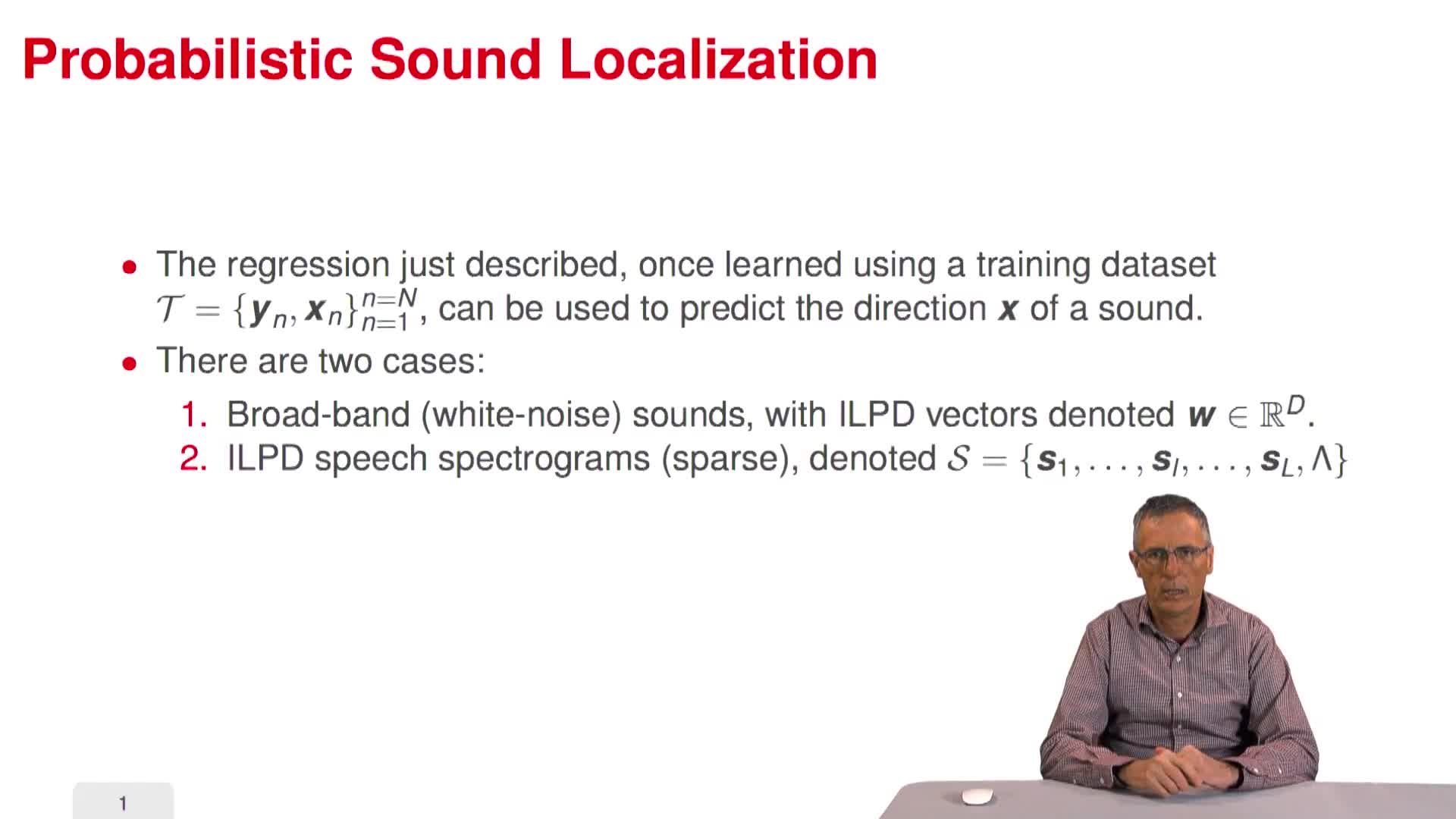
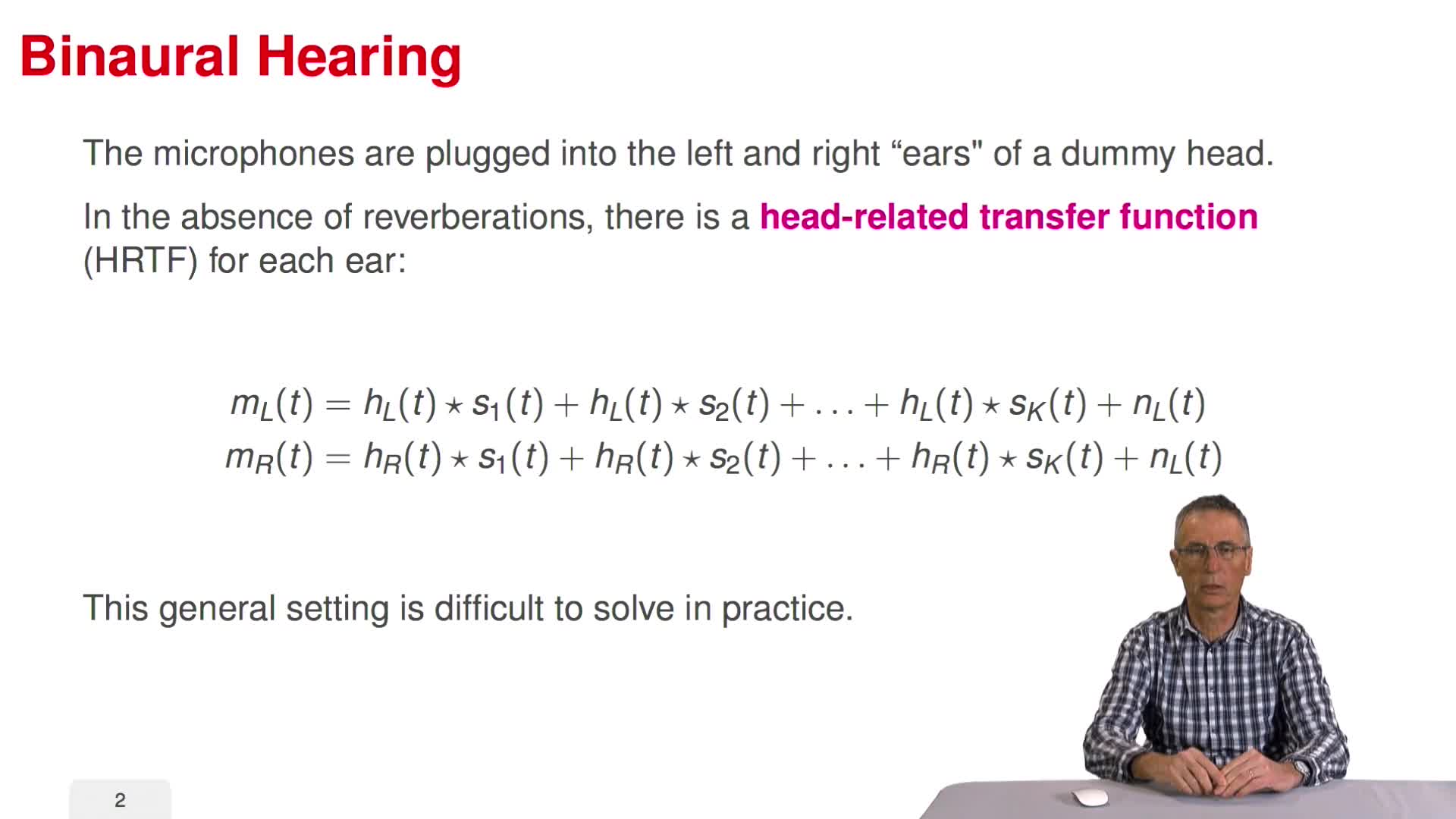
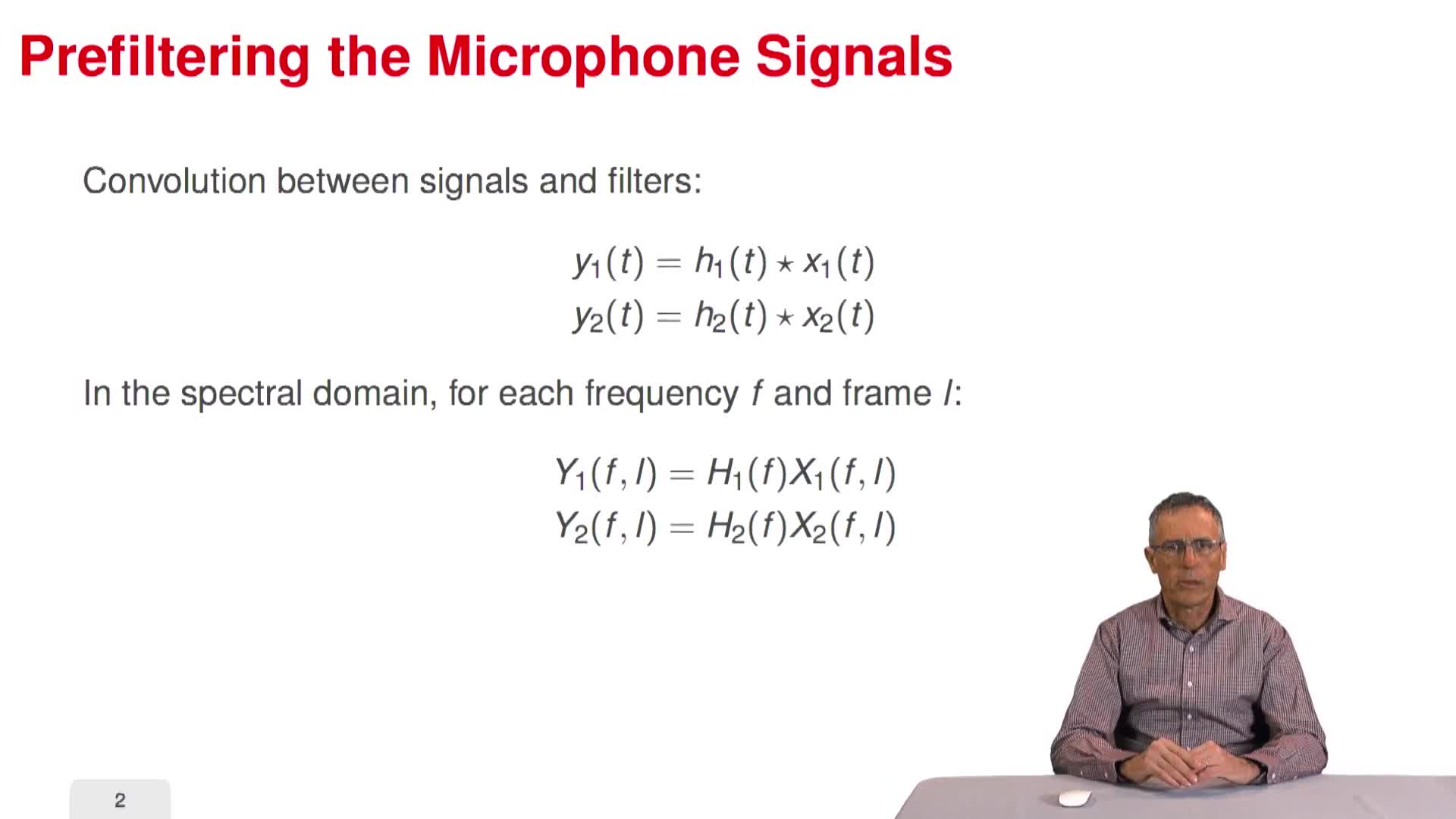
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
Conférence expérimentale du 17 juin 2013 par Stéphane Viollet (CNRS Marseille). La biorobotique est une discipline au service des sciences de l’information et des neurosciences. Tout en apportant aux
Part 1 : Introduction to Robot Hearing 1.1. Why do robots need to hear? 1.2. Human-robot interaction 1.3. Auditory scene analysis 1.4. Audio signal processing in brief 1.5.
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
Autisme et robotique humanoïde : un projet d'observation des prérequis à la communication. Ce projet comporte une partie expérimentation de l'usages d'un robot dans un cadre d'apprentissages avec des
Part 1 : Introduction to Robot Hearing 1.1. Why do robots need to hear? 1.2. Human-robot interaction 1.3. Auditory scene analysis 1.4. Audio signal processing in brief 1.5.