Martinelli, Agostino (19..-....)
- Génie informatique
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
- robotics
- autonomous vehicles
- informatics
- mobile robots
- Applications. Automates
- Informatique - Traitement des données informatiques
Vidéos
3.6. Observability in robotics
In this video we discuss a fundamental issue which arises when we deal with an estimation problem: understanding if the system contains enough information to perform the estimation of the state.
3.8. Applications of the Observability Rank Criterion
In this video we want to apply the observability rank criterion to understand the observability properties of the system that we saw in the previous videos.
3.4. The use of the EKF in robotics
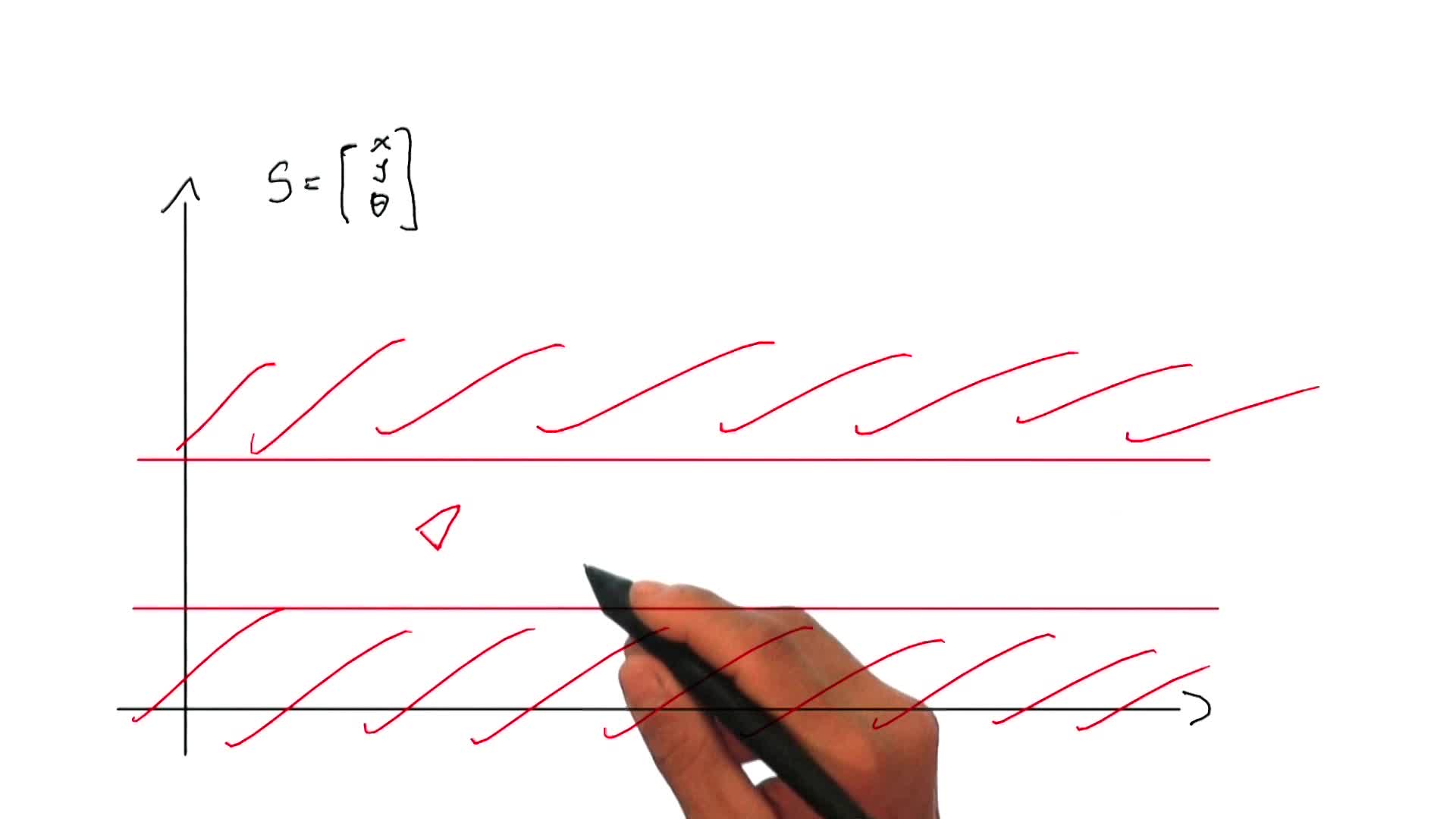
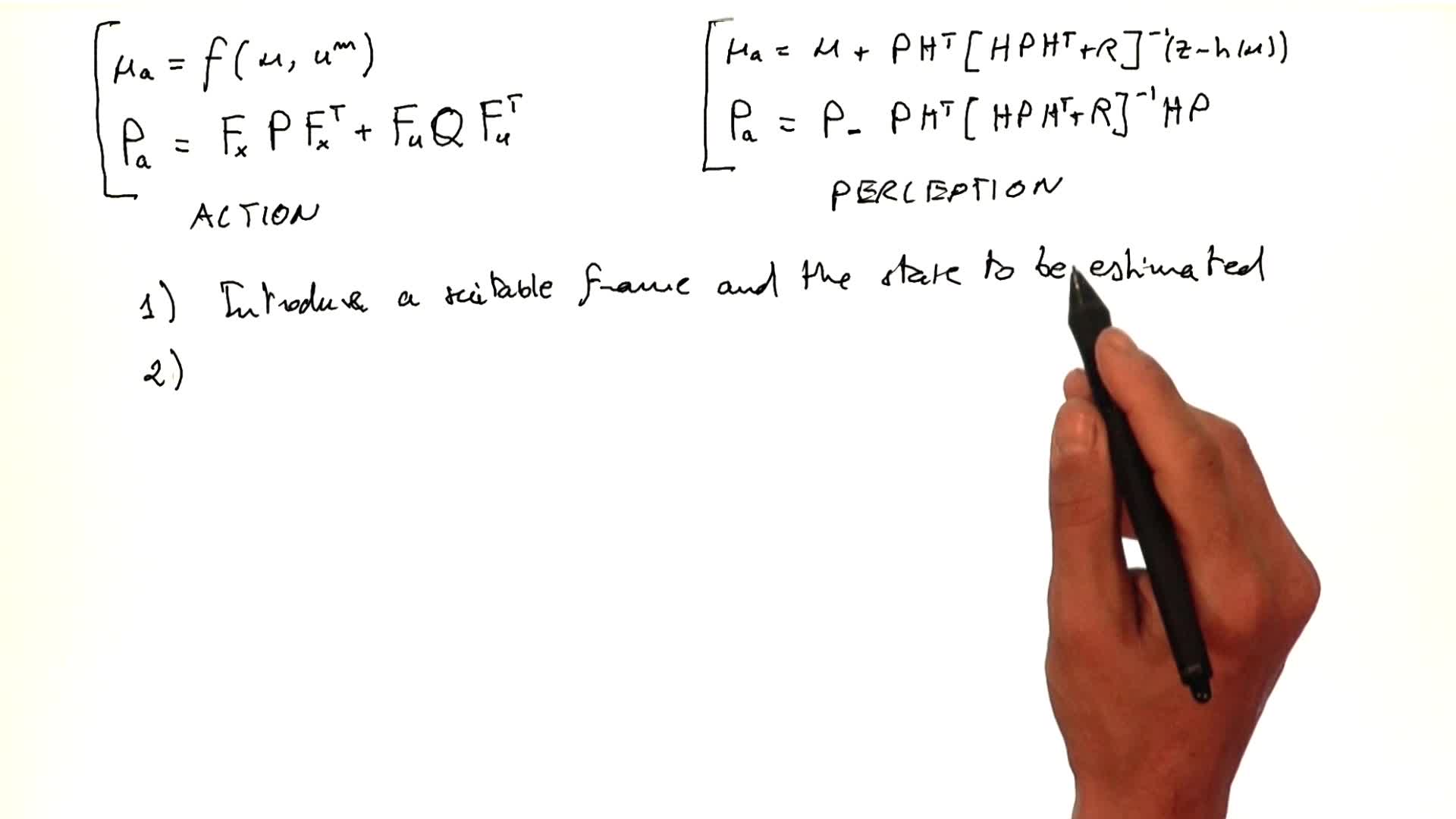
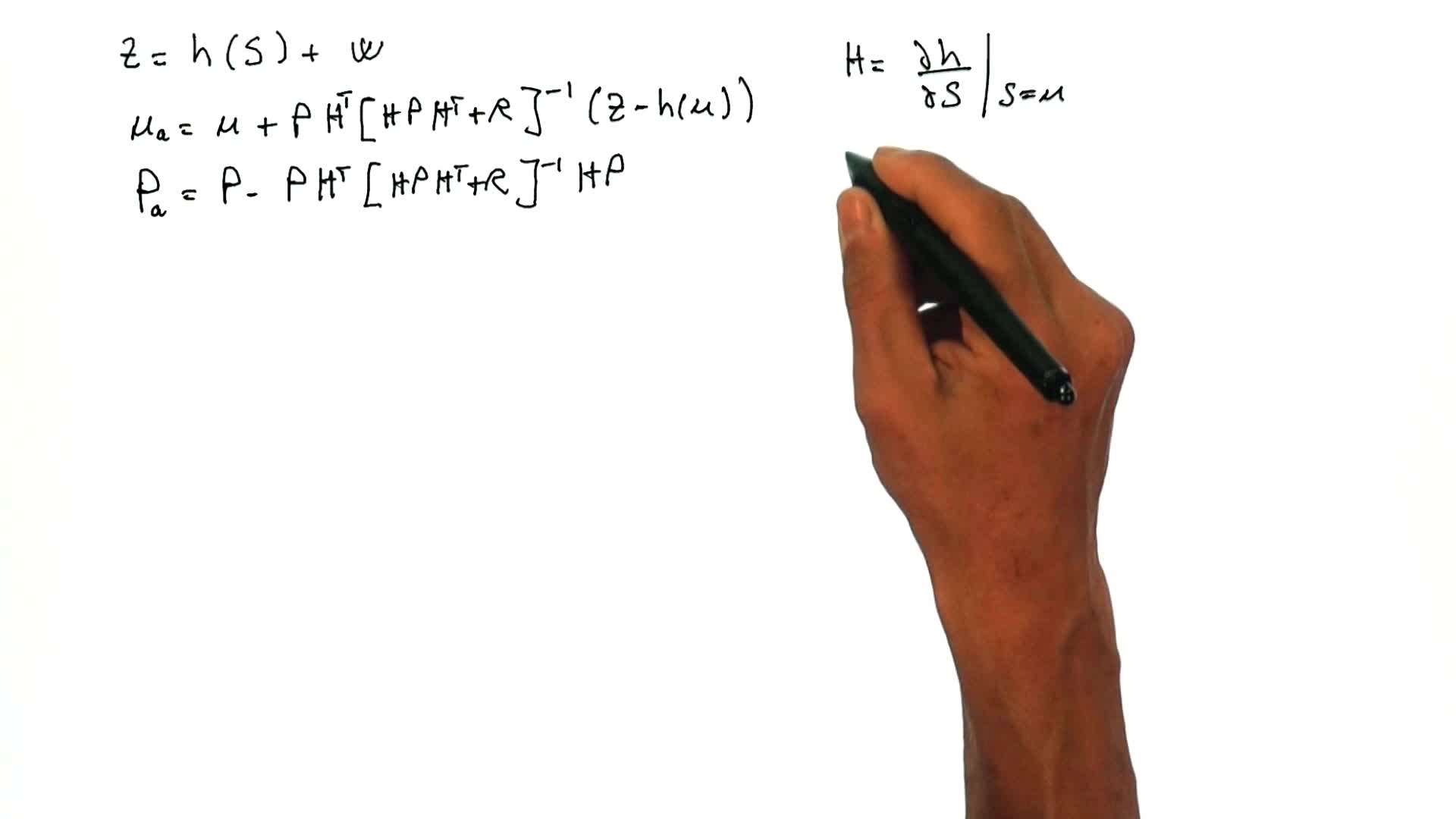
In this video I want to explain the steps that we have to follow in order to implement an extended Kalman filter in robotics.
3.2. Examples for the Perception in the EKF
In this video we discuss the second two equations of the Kalman filter.

3.1. Examples for the Action in the EKF
In part 2, we have seen the equations of the Bayes filter, which are the general equations which allow us to update the probability distribution, as the data from both proprioceptive sensors and
3.5. Simultaneous Localization and Mapping (SLAM)
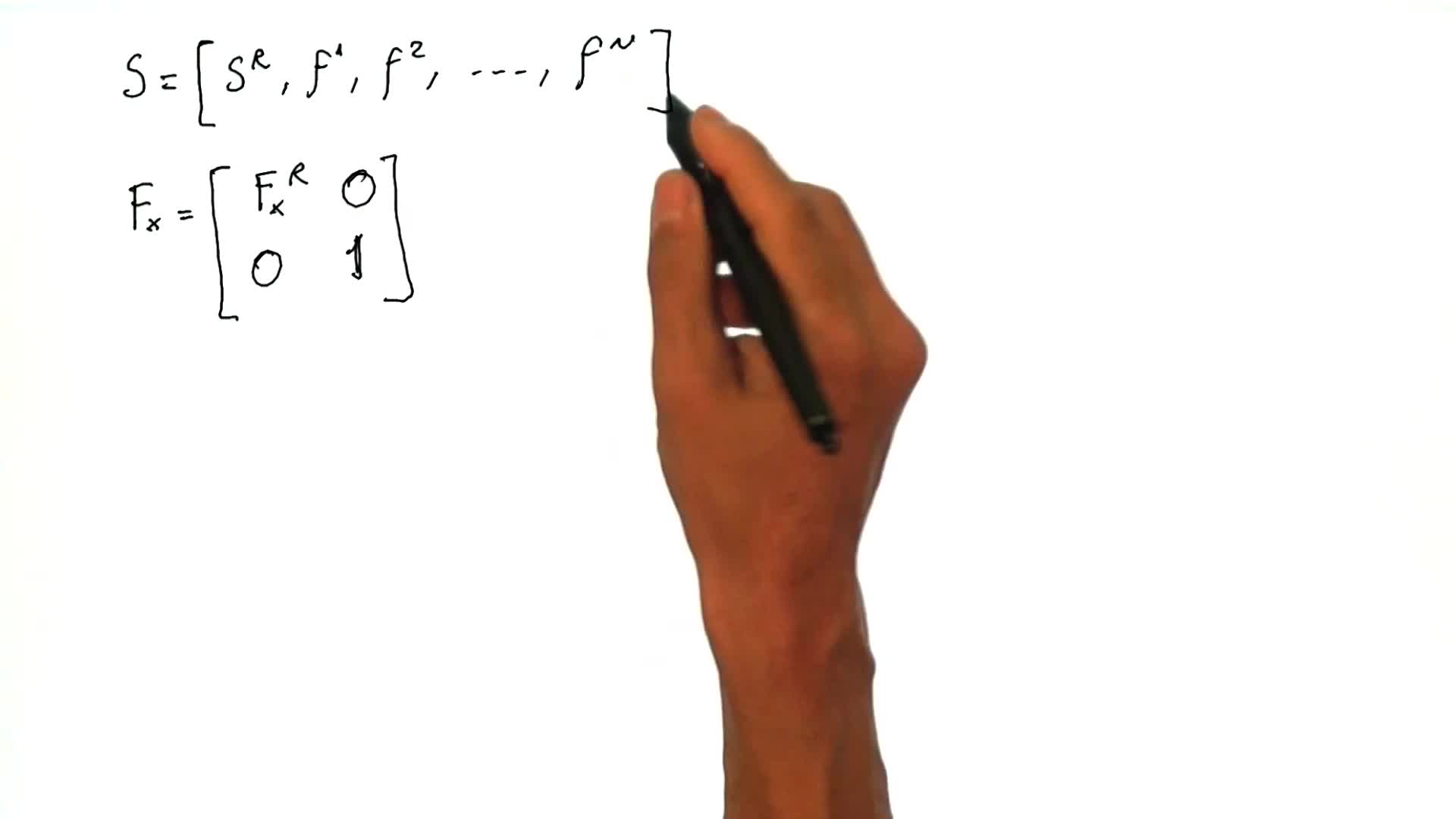
In this video, we are discussing the SLAM problem: simultaneous localization and mapping.
3.7. Observability Rank Criterion
In this video, we discuss an automatic method which is analytical and allows us to answer the question if a state is observable or not: this method is the Observability Rank Criterion which has
3.3. The EKF is a weight mean
In this video I want to discuss the second two equations of the Kalman filter. And in particular I want to show that these actually perform a kind of weight mean.
2.6. The Bayes Filter
The equations of the Bayes filters are the equation that allow us to update the probability distribution for the robot to be in a given configuration by integrating the information that are in the
2.7. Grid Localization: an example in 1D
Now that we have the equations of the Bayes filter, we need a method in order to implement in real cases these equations. So, in the following, I want to discuss two methods, which are commonly
2.1. Localization process in a probabilistic framework: basic concepts
In this part, we will talk about localization which is a fundamental problem that a robot has to be able to solve in order to accomplish almost any tasks. In particular, we will start by
2.5. Reminds on probability
In this sequence I want to remind you a few concepts in the theory of probability and then in the next one we finally derive the equations of the Bayes filter. So the concept that I want to