3.6. Observability in robotics
Martinelli
Agostino
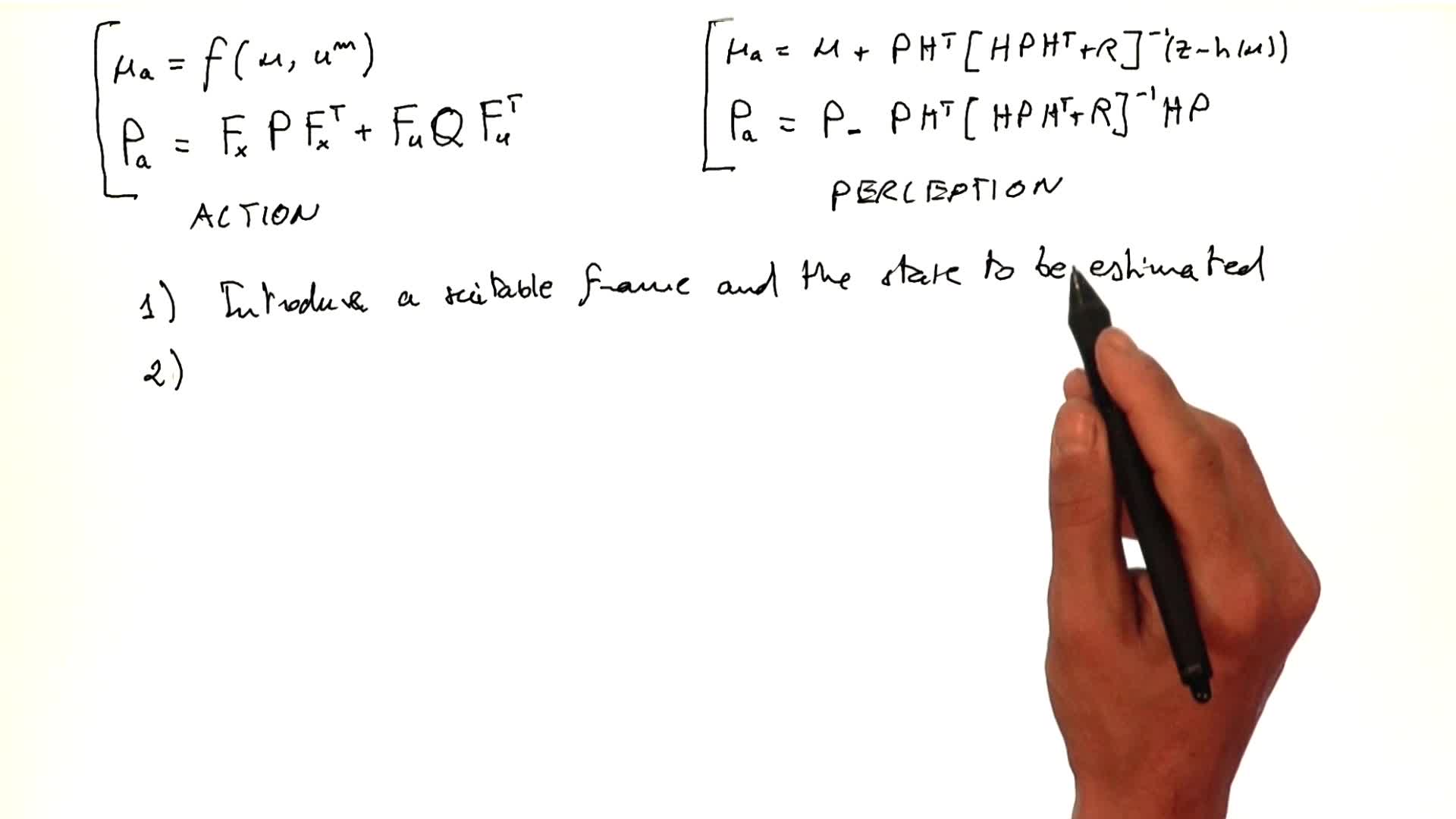
In this video we discuss a fundamental issue which arises when we deal with an estimation problem: understanding if the system contains enough information to perform the estimation of the state.