Notice
Reconfigurable Underwater Robot (RUR): robot architecture and propulsion technology for maneuverability and water tightness - Journées Drones et Cap' 2023
- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
Descriptif
Advancements in autonomous underwater vehicle (AUV) technology have led to rapid progress in their capabilities. However, despite significant improvements in autonomy, AUVs still face limitations in maneuverability. Enhancing AUV agility—both in terms of maneuverability and speed—would result in greater operational autonomy. The combination of modern computing power and advanced sensor technologies enables sophisticated and precise control based on dynamic models. These developments, when effectively integrated with propulsion and control systems, have the potential to significantly improve AUV agility.
Among recent innovations in propulsion systems, reconfigurable vectorial propulsion stands out as a competitive alternative to biomimetic and bio-inspired approaches, mainly due to its reduced complexity and fewer degrees of freedom to manage. In this system, thrust vectors can be redirected, providing an integrated solution for both propulsion and guidance. This approach has the potential to significantly reduce the total number of thrusters required, as it allows adjustments not only to the intensity of the thrust but also to its direction. Moreover, vector reorientation through mechanisms such as servo motors is typically faster than adjusting propeller speed.
Recent research indicates that watertight, contactless transmission systems using synchronous magnetic couplings offer a reliable solution for building reconfigurable vectorial thrusters, particularly for deep-sea exploration. Robots equipped with such propulsion systems—such as our RUR—will benefit from enhanced autonomous mobility, enabling access to complex missions that are currently performed by human divers or remotely operated vehicles (ROVs).
This project lies at the intersection of service robotics and environmental robotics. Specifically, the RUR will be designed to carry out inspection and maintenance tasks for energy marine renewable (EMR) systems, with a primary focus on offshore wind turbines. The economic viability of offshore wind energy depends heavily on cost-effective maintenance solutions, which remain prohibitively expensive with current methods.
Intervention / Responsable scientifique
Thème
Sur le même thème
-
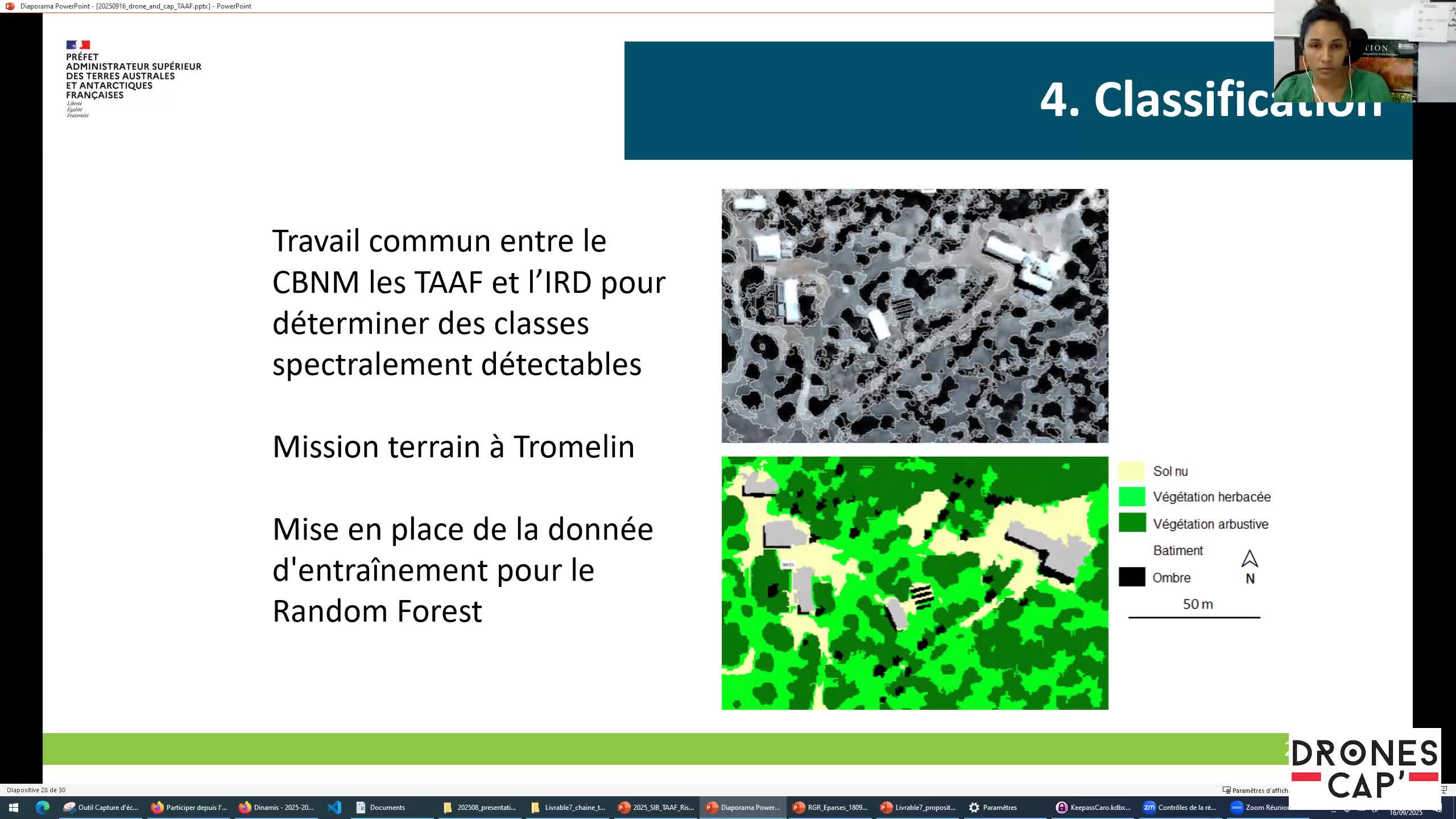
Retours d'expérience sur l'usage du drone multispectral DJI Mavic 3M pour la caractérisation de la …
MouquetPascalKurzrockCarolineEn tant que gestionnaire d'espaces protégés isolés, les Terres Australes et Antarctiques Françaises recherchent des méthodes de suivi pratiques et reproductibles pour améliorer la connaissance et la
-
Sécurité et Réglementation Drones - Journées Drones et Cap' 2023
CornuFrançoisSécurité et Réglementation Drones - Journées Drones et Cap' 2023
-
Photogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude - Journées Drones et Ca…
JamesDorothéePhotogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude
-
L'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes…
MichaudEmmaL'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes des vasières tropicales
-
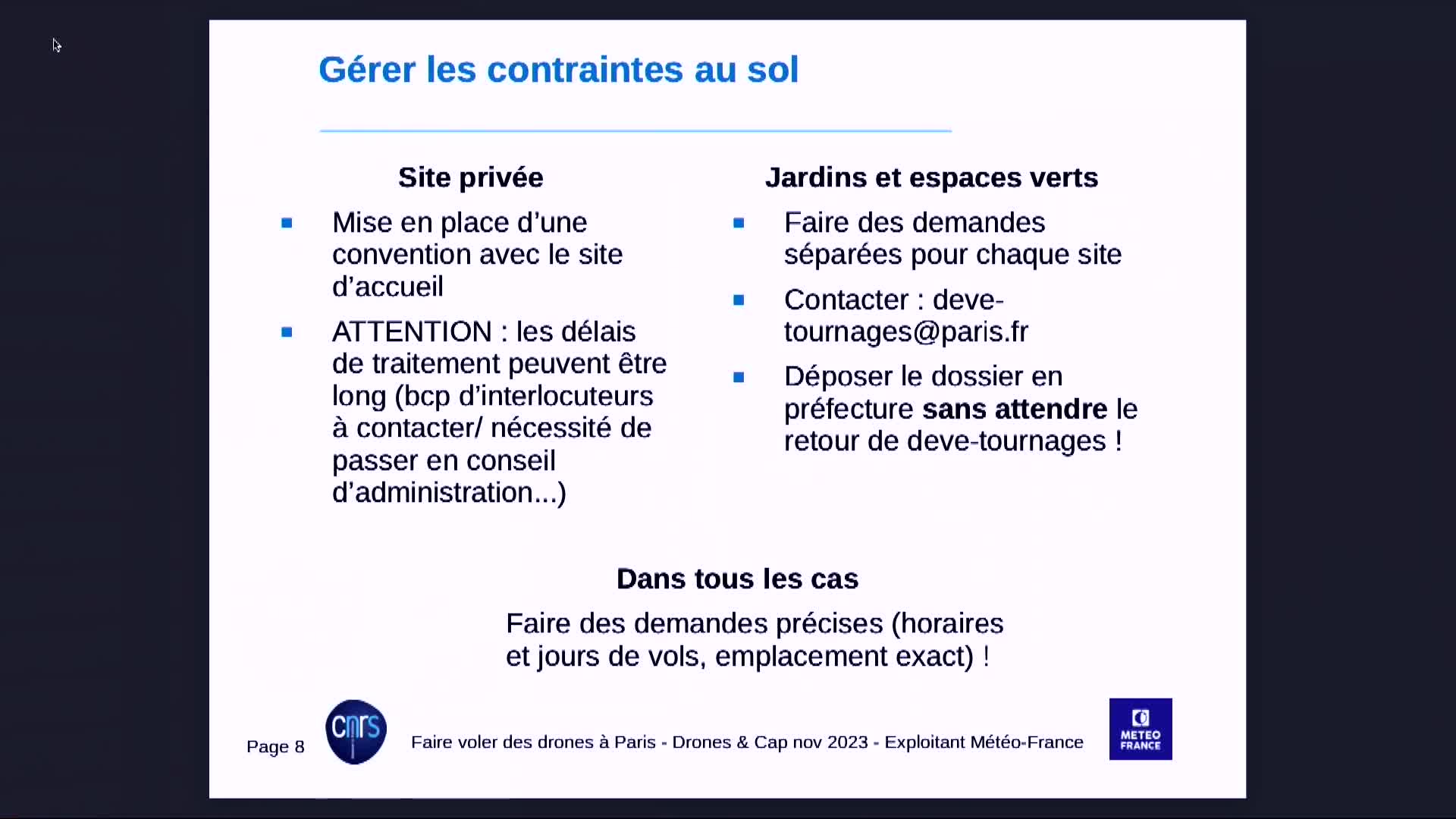
Réaliser une campagne de drones à Paris - Journées Drones et Cap' 2023
GoretMarineRéaliser une campagne de drones à Paris
-
Système actif hyper-fréquences porté par drone - Journées Drones et Cap' 2023
PaillouPhilippeSystème actif hyper-fréquences porté par drone
-
Apport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observatio…
Le GallThierryApport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observation du littoral
-
Prospection thermique par drone en Archéologie - Journées Drones et Cap' 2023
FovetEliseVoldoireOlivierVautierFranckToumazetFrédéricDackoMarionČučkovićZoranCette communication présente les premiers résultats d’une étude en cours sur la reconnaissance des vestiges archéologiques via des capteurs thermiques embarqués sur drone. L’utilisation de cette
-
Evaluation topographique du tandem Drone Matrice 300RTK + LIDAR L1 - Journées Drones et Cap' 2023
FleuryJulesÉvaluer la précision topographique d'un relevé combinant le capteur LiDAR L1 et le drone Matrice 300RTK
-
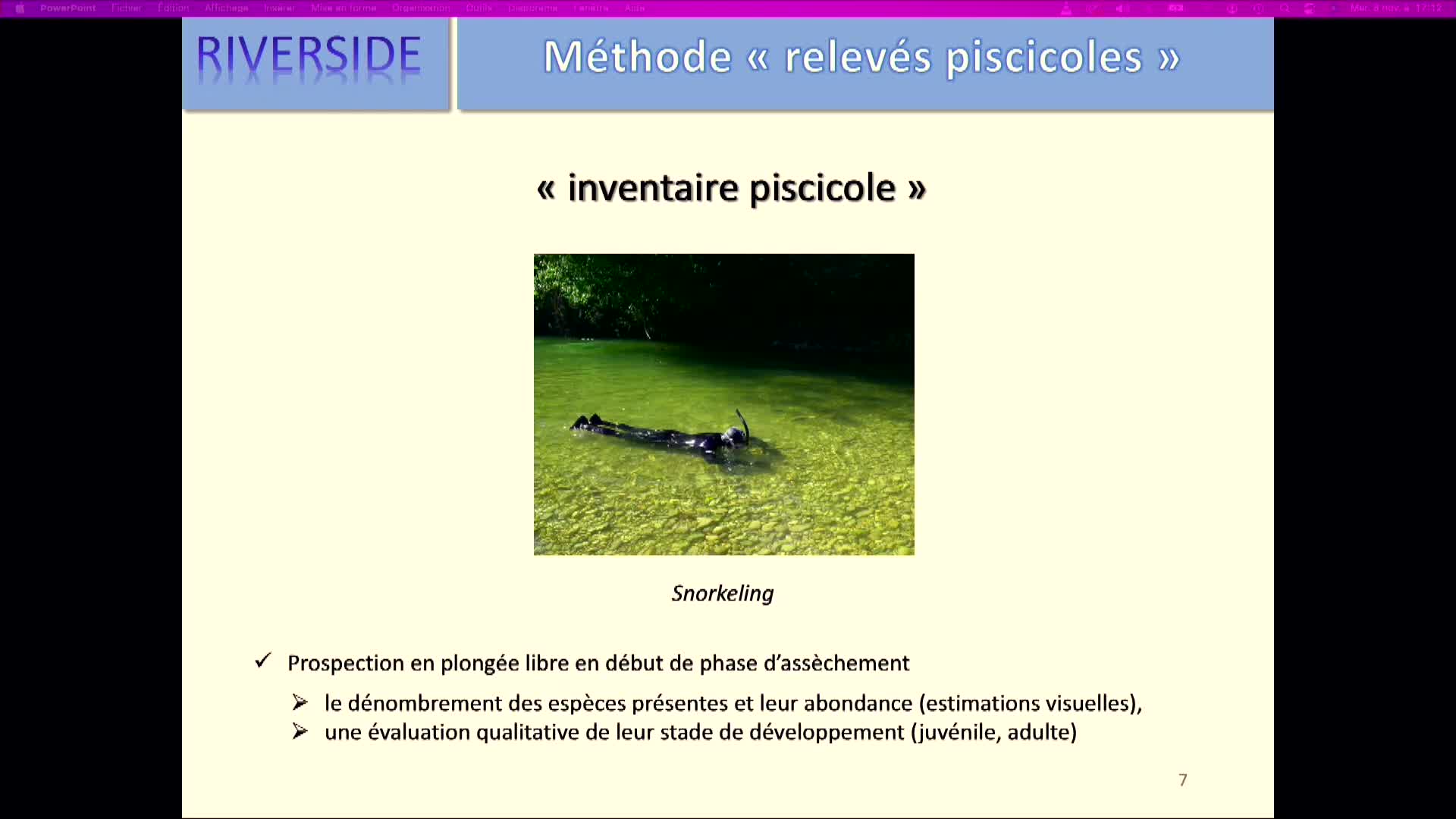
Caractérisation des habitats piscicoles d'une rivière intermittente par imagerie drone - Journées D…
LejotJérômeCaractérisation des habitats piscicoles d'une rivière intermittente par imagerie drone
-
Contribution des infrarouges de l’Altum-PT pour la cartographie des littoraux de carbone bleu - Jou…
CollinAntoineLes écosystèmes de carbone bleu, tels que les marais maritimes, les mangroves et les herbiers marins, jouent un rôle crucial dans la séquestration du carbone et la protection des côtes...
-
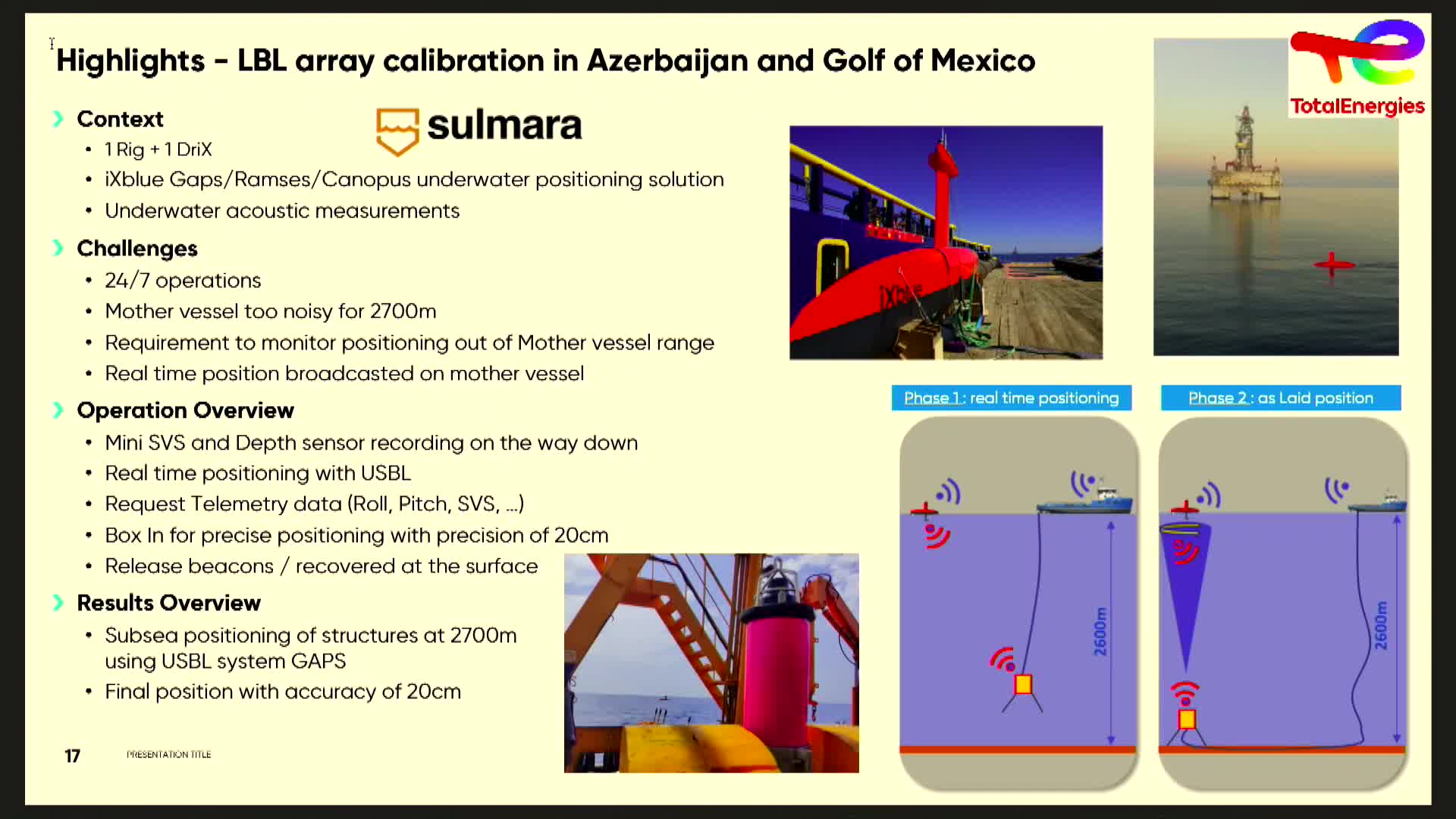
DRIX au service de la recherche scientifique hauturière - Journées Drones et Cap' 2023
GermondFabienDRIX au service de la recherche scientifique hauturière