Drones et Cap'
Nos dernières publications
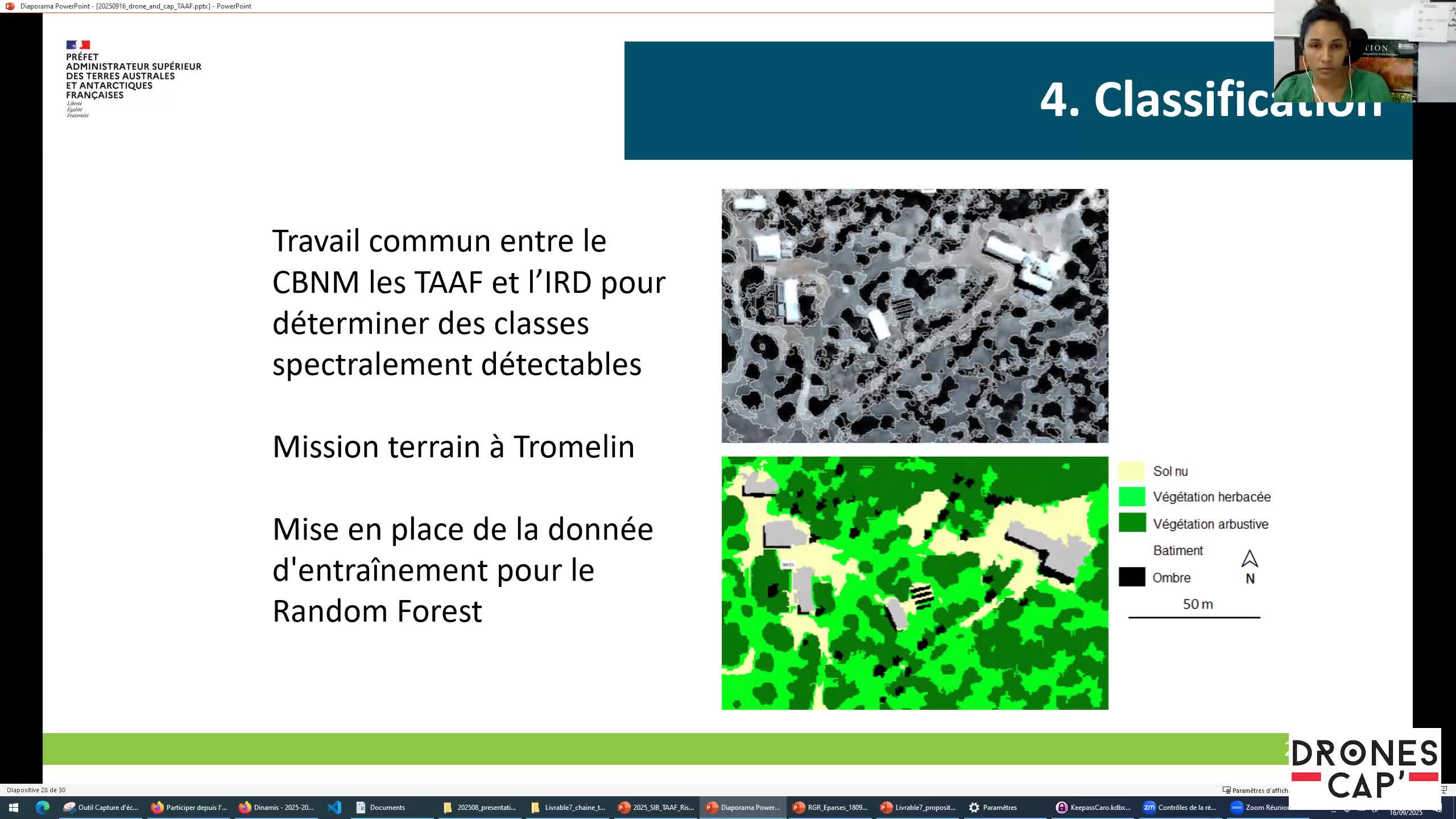
Retours d'expérience sur l'usage du drone multispectral DJI Mavic 3M pour la caractérisation de la …
En tant que gestionnaire d'espaces protégés isolés, les Terres Australes et Antarctiques Françaises recherchent des méthodes de suivi pratiques et reproductibles pour améliorer la connaissance et la

Reconfigurable Underwater Robot (RUR): robot architecture and propulsion technology for maneuverabi…
Reconfigurable Underwater Robot (RUR): robot architecture and propulsion technology for maneuverability and water tightness

Sécurité et Réglementation Drones - Journées Drones et Cap' 2023
Sécurité et Réglementation Drones - Journées Drones et Cap' 2023

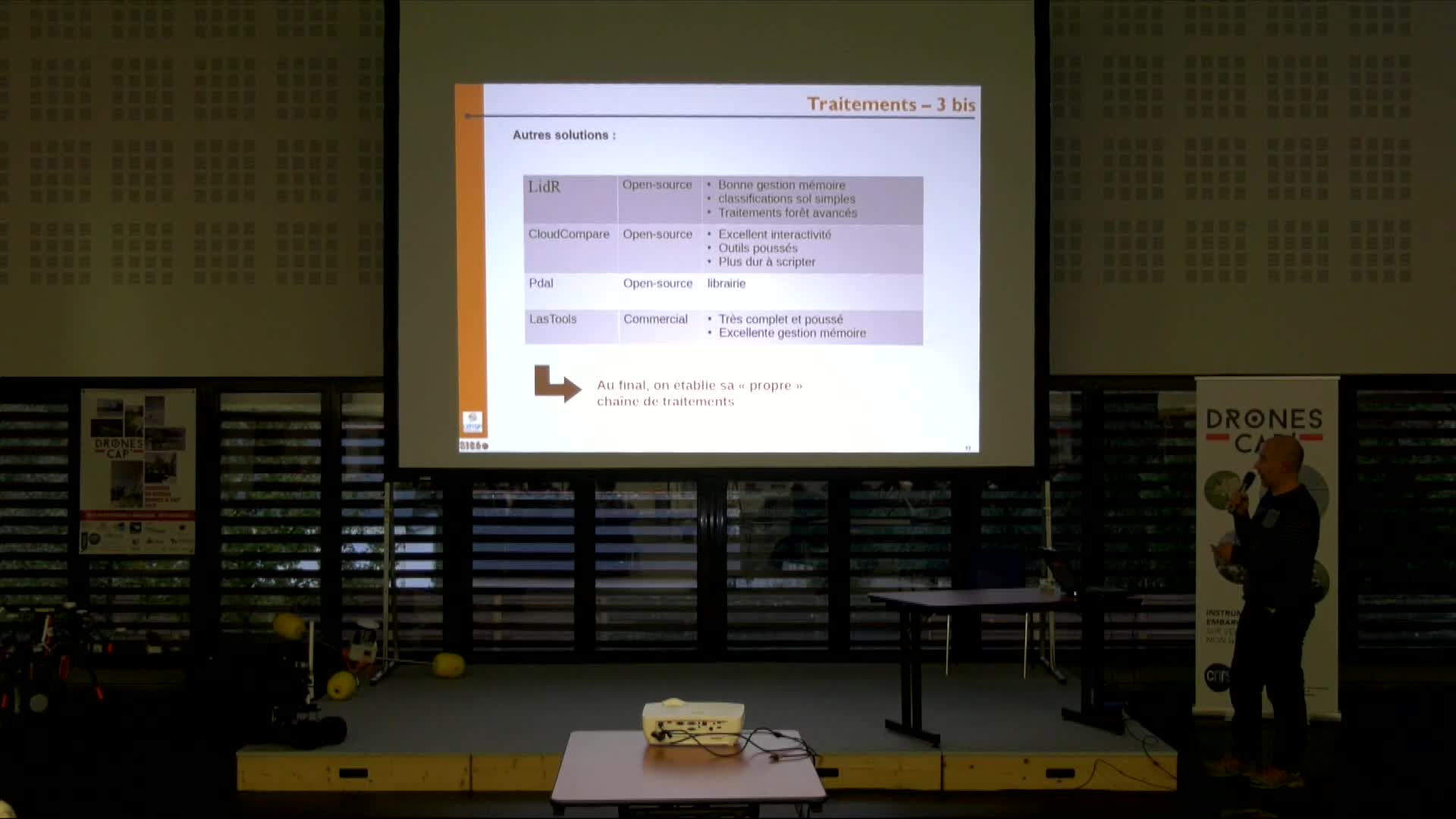
Photogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude - Journées Drones et Ca…
Photogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude
L'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes…
L'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes des vasières tropicales
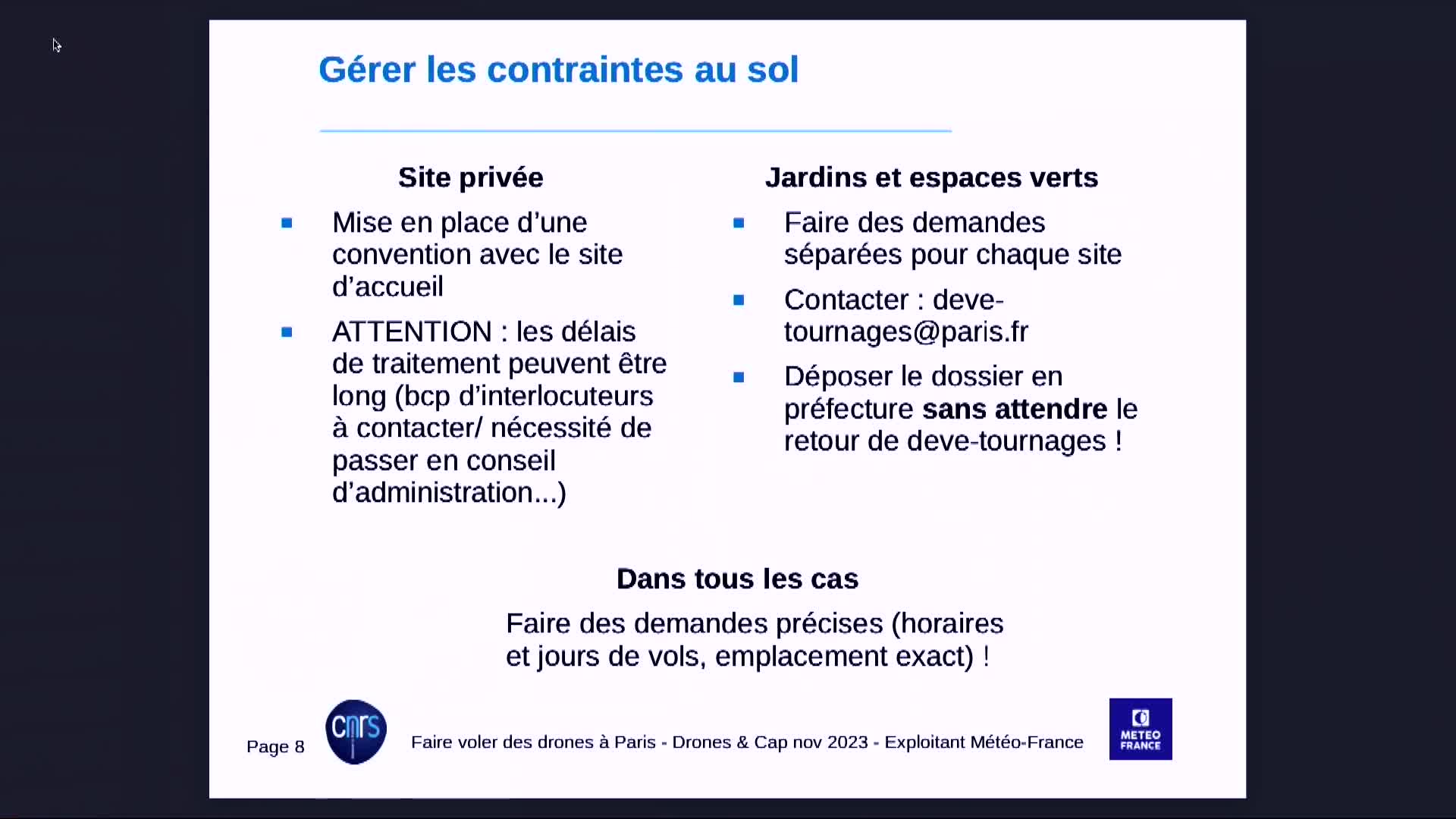
Réaliser une campagne de drones à Paris - Journées Drones et Cap' 2023
Réaliser une campagne de drones à Paris

Système actif hyper-fréquences porté par drone - Journées Drones et Cap' 2023
Système actif hyper-fréquences porté par drone

Apport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observatio…
Apport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observation du littoral
Prospection thermique par drone en Archéologie - Journées Drones et Cap' 2023
Cette communication présente les premiers résultats d’une étude en cours sur la reconnaissance des vestiges archéologiques via des capteurs thermiques embarqués sur drone. L’utilisation de cette
Evaluation topographique du tandem Drone Matrice 300RTK + LIDAR L1 - Journées Drones et Cap' 2023
Évaluer la précision topographique d'un relevé combinant le capteur LiDAR L1 et le drone Matrice 300RTK
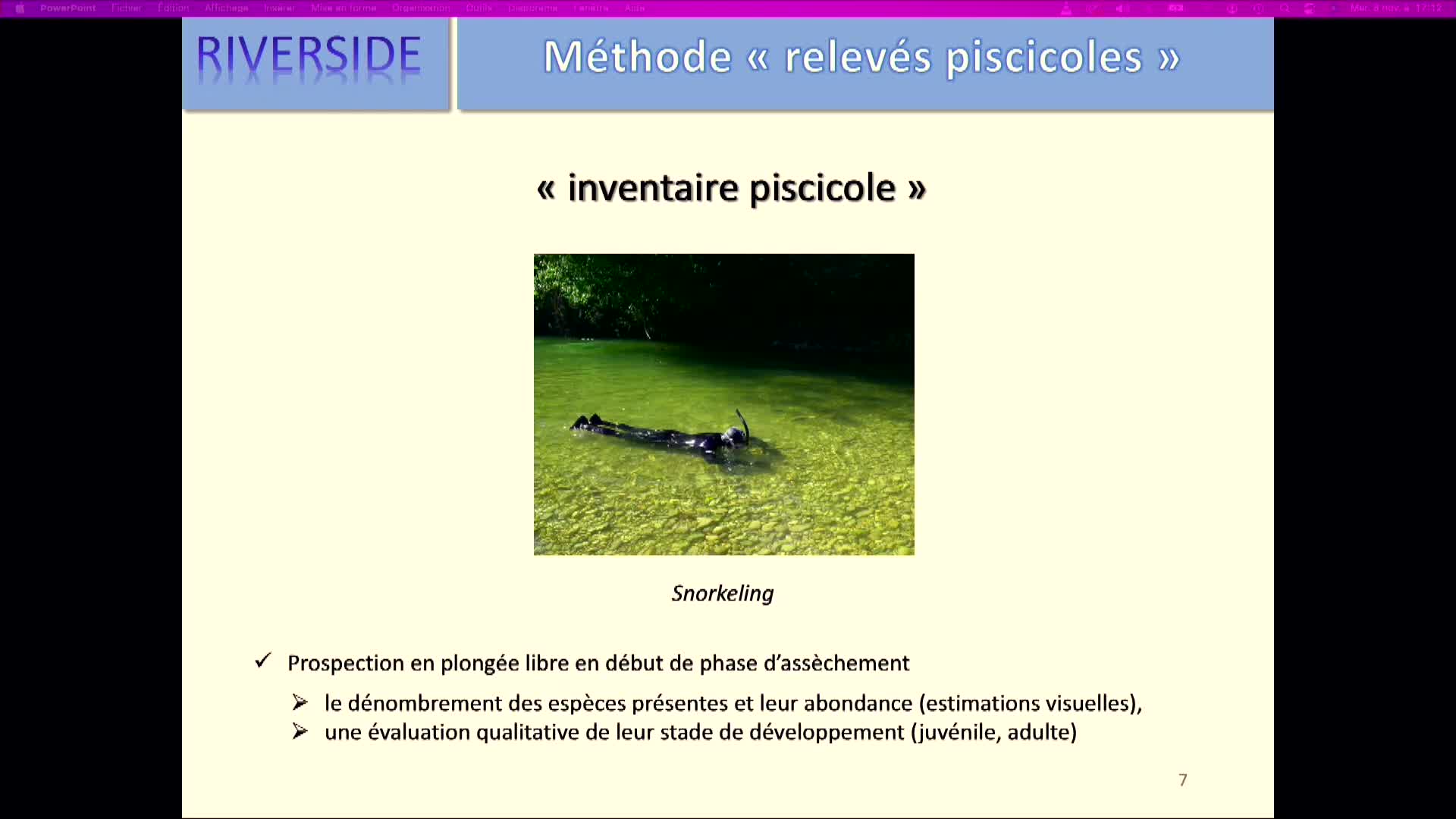
Caractérisation des habitats piscicoles d'une rivière intermittente par imagerie drone - Journées D…
Caractérisation des habitats piscicoles d'une rivière intermittente par imagerie drone

Contribution des infrarouges de l’Altum-PT pour la cartographie des littoraux de carbone bleu - Jou…
Les écosystèmes de carbone bleu, tels que les marais maritimes, les mangroves et les herbiers marins, jouent un rôle crucial dans la séquestration du carbone et la protection des côtes...
Intervenants et intervenantes
Ingénieur de recherche, Docteur, UMR Marbec IRD-Université de Montpellier (en 2016)
Thèse de doctorat en sciences de la Terre soutenue en 2000 à l'Université de Paris 7

Thèse de doctorat en Ecologie soutenue à l' Université de Paris 6 (en 2006). - Chargé de recherches CEFE-CNRS Montpellier 2 (en 2013, en 2024)
Maître conférences en sciences de la vie et de la terre, à l'Ecole Pratique des Hautes Etudes - PSL (EPHE-PSL) depuis 2014.
Titulaire d'un DUT génie Électrique et Informatique Industrielle, Nantes (en 2003). - Télépilote de drone civil, gestionnaire et auditeur du pôle Drones au CNRS (en 2023)
Océanographe, membre du laboratoire LIENSs - LIttoral ENvironnement et Sociétés, UMR7266, LIENSs, Université de la Rochelle (en 2023)

Auteur d'une thèse d'Archéologie à l'université de Bourgogne Franche-Comté, en 2019. En 2024, membre du laboratoire CHEC, UR 1001.

Auteur d'une thèse en Histoire à Clermont-Ferrand 2 en 2016
Fondateur de la société XSUN (en 2023)
Auteur d'une thèse en Génie mécanique à Brest (en 2019). - Professeur associé de robotique à l'école d'ingénieure ISEN Ouest de Brest (en 2023)
Sergent-chef des sapeurs-pompiers des Yvelines (en 2024)
Ingénieur de recherche à Aix-Marseille Université depuis 2006. Co-responsable du service commun d’Imagerie et Géomatique (SIGéo) du Centre Européen de Recherche en Géosciences de l’Environnement (CEREGE UMR CNRS 7330) (en 2022)