Notice
Drones et Industrie
- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
Descriptif
L’inspection, la surveillance ou la réalisation d’opérations (inventaires, ...) sur des sites
industriels (pétrochimie, logistique, nucléaire, ...) sont devenues des préoccupations majeures
pour les responsables en charge d’exploiter des installations à risques et notamment celles
classées SEVESO II. Les opérations d’inspection et de maintenance nécessitent
généralement d’importants moyens humains et matériels (poses d’échafaudages, nacelles,
cordistes...) et sont le plus souvent très coûteuses. Par ailleurs, elles se heurtent à des
contraintes environnementales variées et sévères (luminosité aléatoire, visibilité dégradée,
chaleur, toxicité, espaces clos, parois, présence d'obstacles et/ou de tuyauteries...) et doivent
respecter des normes de sécurité draconiennes (ATEX).
L’utilisation de moyens robotiques mobiles (terrestres, aériens et aquatiques) peut donc
simplifier et rendre plus sures, plus efficaces et plus compétitives de nombreuses opérations
sur des sites industriels. En effet, l’une des principales motivations au développement de la
robotique mobile ces dernières années est de remplacer l’être humain lorsque des
interventions en milieux hostiles sont nécessaires (inspection de pipelines, démantèlement de
centrales nucléaires, inventaires, ...). Désormais, les robots mobiles (drones) terrestres,
aériens ou aquatiques peuvent évoluer de manière quasi-autonome et coopérative et devenir
des auxiliaires précieux pour réunir des informations sur l’état d’un site (repérage de fuites,
imagerie thermique, repérage de parties corrodées, ...) ou exécuter des tâches répétitives
potentiellement dangereuses (inventaires, approvisionnements sur des lignes de production).
La principale difficulté lors de la mise en œuvre de tels moyens réside dans la nature de
l'environnement, évolutif et difficilement aménageable. Par exemple, le déploiement de balises
pour le guidage des robots mobiles (terrestres et aériens) ou l’installation de dispositifs
d’éclairage supplémentaires n’est pas toujours possible. De plus, les essais déjà réalisés en
milieu industriel ont mis en évidence les difficultés pour le pilote à se concentrer à la fois sur
l’inspection du site (prises de vue, ...) et sur le pilotage. Une assistance au pilotage s’avère
par conséquent indispensable.
Par ailleurs, la complexité de la méthode de navigation mise en œuvre sur les robots mobiles
(terrestres, aériens, aquatiques) dépend de l'environnement dans lequel ils doivent évoluer
(milieu intérieur ou environnement naturel, sol plan ou irrégulier, visibilité, ...) et nécessite de
reconstruire un modèle de l'espace navigable à partir des données issues des capteurs. En
d’autres termes, il convient de maitriser parfaitement la localisation et la perception de
l'environnement pour fusionner et intégrer les données issues des capteurs (extéroceptifs et
proprioceptifs) dans le contrôle-commande.
Intervention / Responsable scientifique
Sur le même thème
-
Colloque ENERGON 2025 - Session 7 : Prévenir les conflits, comprendre les territoires, outils et mé…
PistoniRobertaZerbib, ZoéMattinaCesareDavietSylvieVelutSébastienMeyerTevaColloque ENERGON 2025 : Transition Energétique et Reconfiguration des Territoires
-
Colloque ENERGON 2025 - Session 2: La Transition Energétique dans les territoires anciennement indu…
NoackYvesMaillard, DorianDavietSylvieColloque ENERGON 2025 : Transition Energétique et Reconfigurations des Territoires
-
Colloque ENERGON 2025 - Session 1: Transition Energétique, Décarbonation et Industrie
BoutillierSophieBailoniMarkAubertTiffanyGrondeauAlexandreMiailhes, LucasVelutSébastienColloque ENERGON 2025 : Transition Energétique et Reconfigurations des Territoires
-
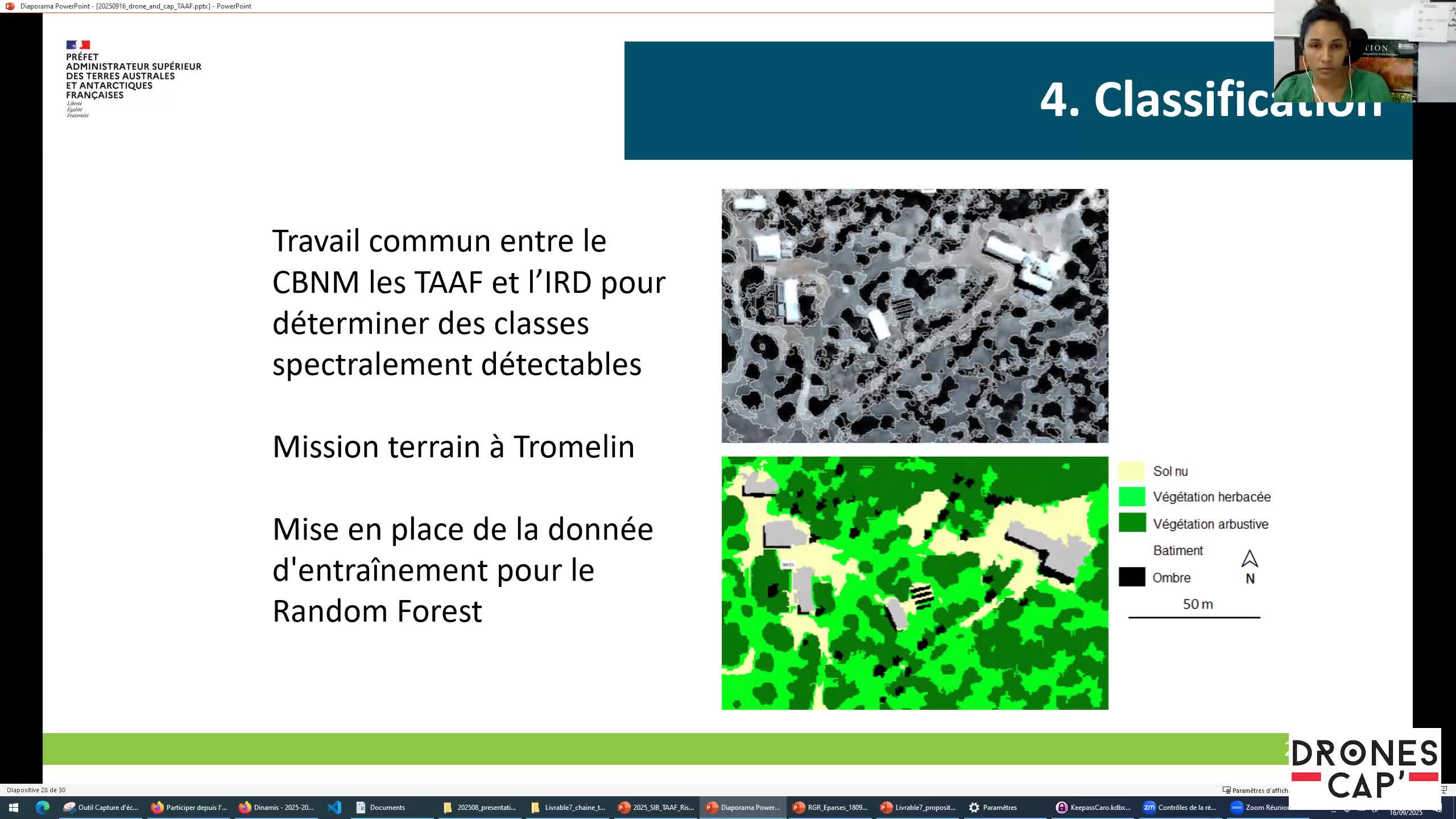
Retours d'expérience sur l'usage du drone multispectral DJI Mavic 3M pour la caractérisation de la …
MouquetPascalKurzrockCarolineEn tant que gestionnaire d'espaces protégés isolés, les Terres Australes et Antarctiques Françaises recherchent des méthodes de suivi pratiques et reproductibles pour améliorer la connaissance et la
-
Reconfigurable Underwater Robot (RUR): robot architecture and propulsion technology for maneuverabi…
Fagundes GasparotoHenriqueVerduTitouanReconfigurable Underwater Robot (RUR): robot architecture and propulsion technology for maneuverability and water tightness
-
Sécurité et Réglementation Drones - Journées Drones et Cap' 2023
CornuFrançoisSécurité et Réglementation Drones - Journées Drones et Cap' 2023
-
Photogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude - Journées Drones et Ca…
JamesDorothéePhotogrammétrie vs. lasergrammétrie par drone aérien sur la Côte d'Émeraude
-
L'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes…
MichaudEmmaL'utilisation des drones pour un suivi spatio-temporel des activités de bioturbation par les crabes des vasières tropicales
-
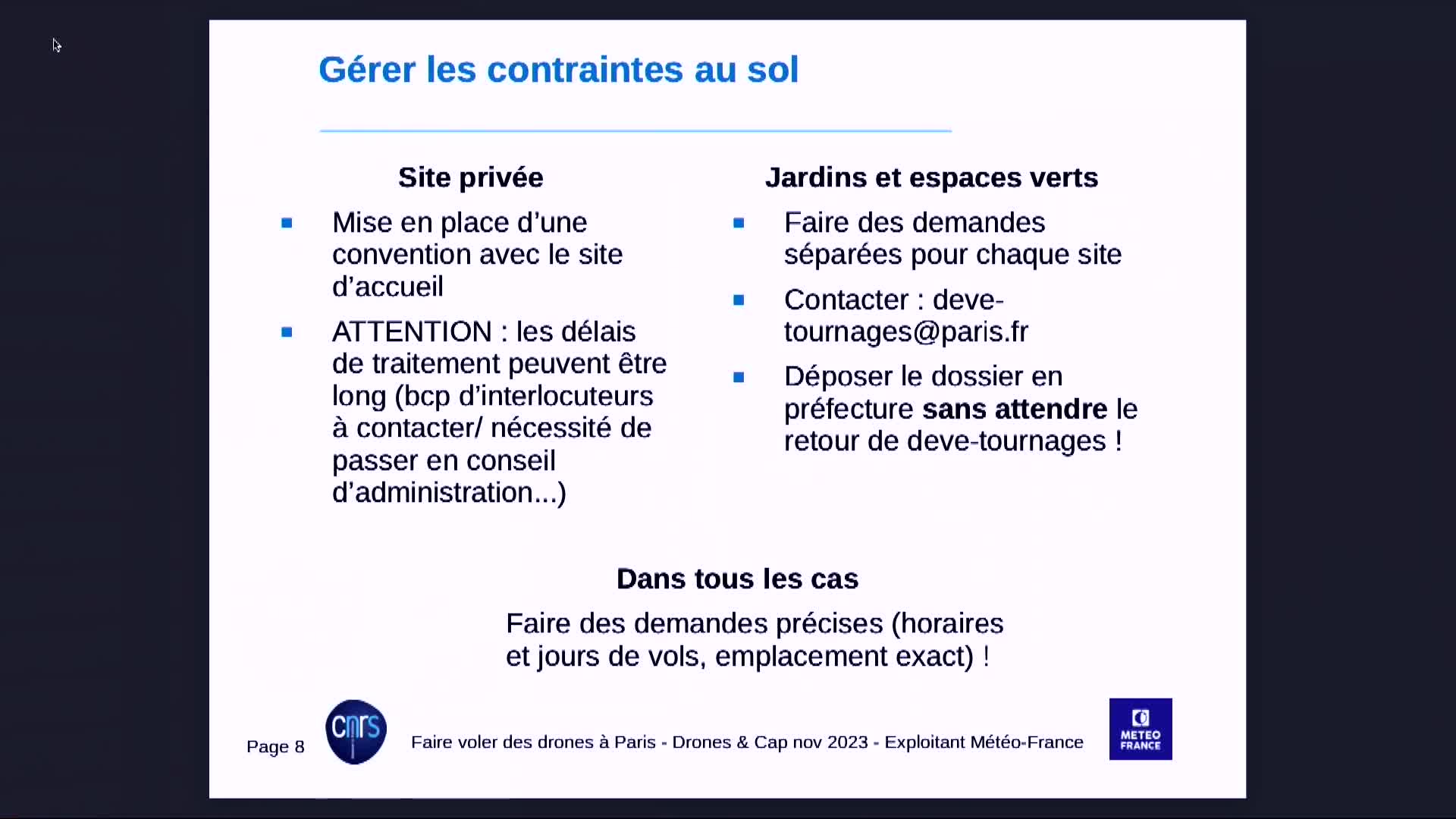
Réaliser une campagne de drones à Paris - Journées Drones et Cap' 2023
GoretMarineRéaliser une campagne de drones à Paris
-
Système actif hyper-fréquences porté par drone - Journées Drones et Cap' 2023
PaillouPhilippeSystème actif hyper-fréquences porté par drone
-
Apport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observatio…
Le GallThierryApport de la radio-logicielle pour l’analyse des problèmes de communication d’un drone d’observation du littoral
-
Prospection thermique par drone en Archéologie - Journées Drones et Cap' 2023
FovetEliseVoldoireOlivierVautierFranckToumazetFrédéricDackoMarionČučkovićZoranCette communication présente les premiers résultats d’une étude en cours sur la reconnaissance des vestiges archéologiques via des capteurs thermiques embarqués sur drone. L’utilisation de cette