3 : Sound-Source Localization
Descriptif
During the third part, we will study Sound-Source Localization: time difference of arrival (TDOA), estimation of TDOA by cross-correlation, in the temporal and spectral domains, the geometry of multiple microphones, embedding the microphones in a robot head, predicting direction of a sound with a robot head and an example of sound direction estimation.
Vidéos
Time difference of arrival (TDOA)
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two

Estimation of TDOA by cross-correlation
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
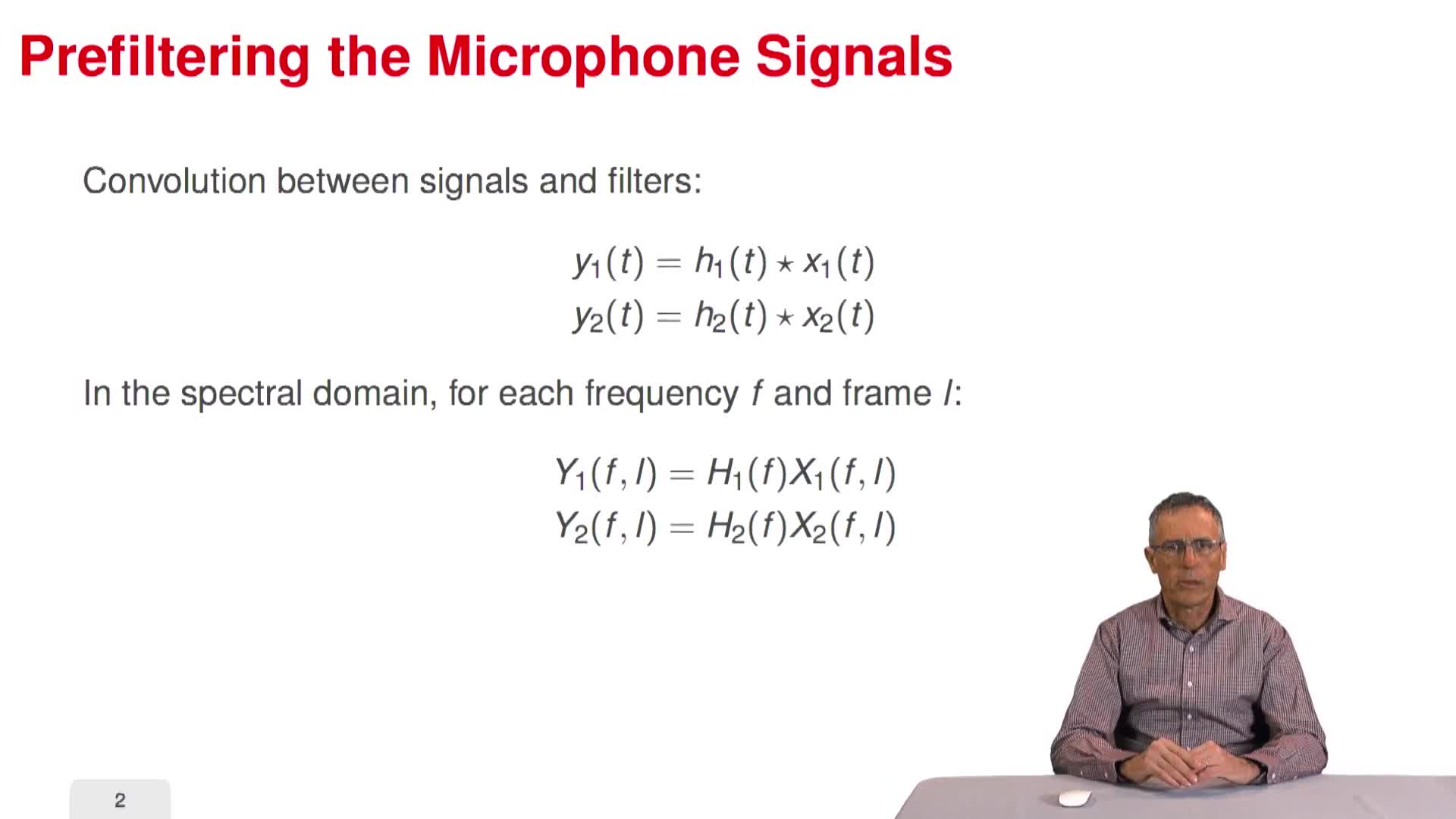
Estimation of TDOA in the spectral domain
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
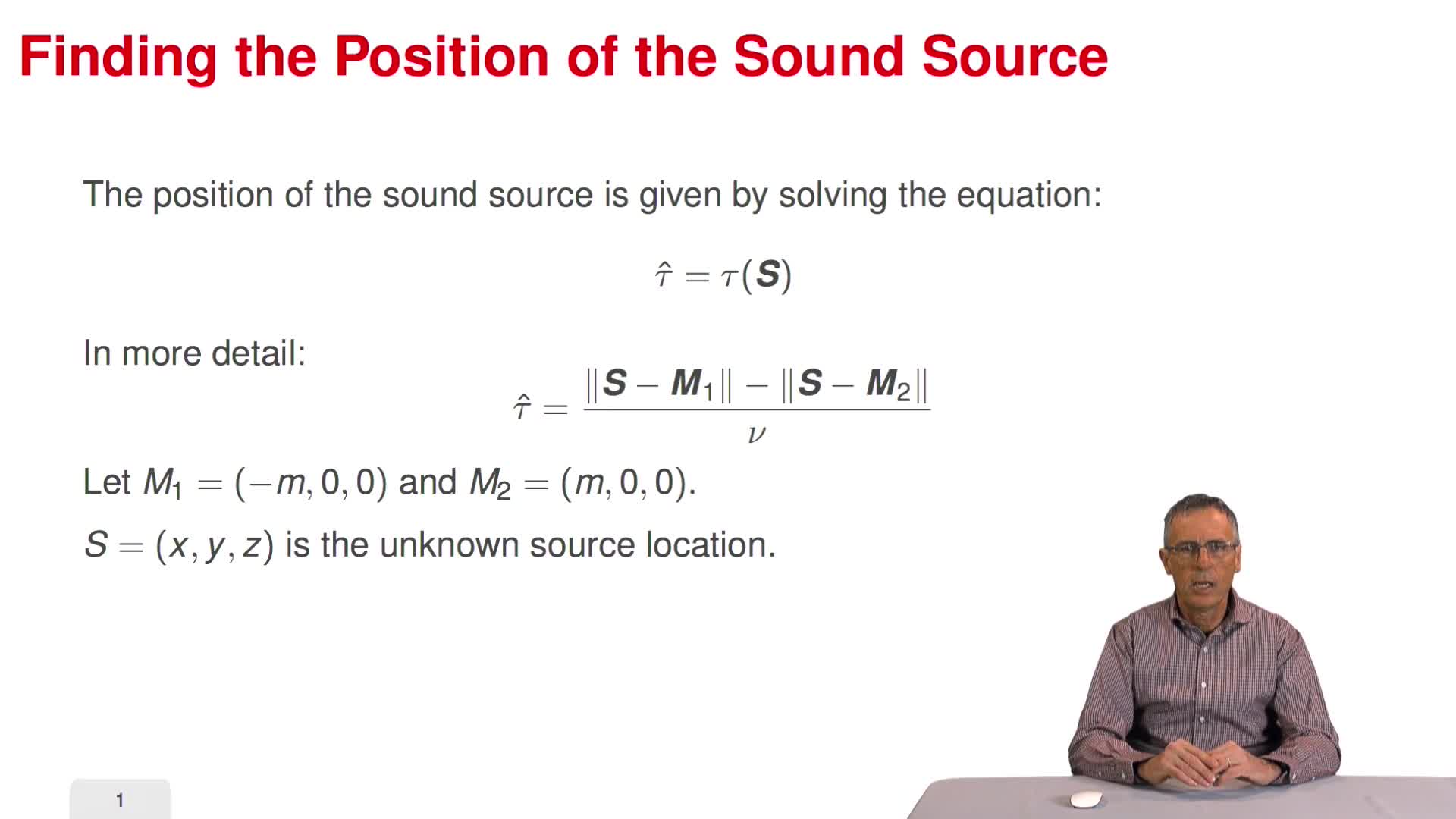
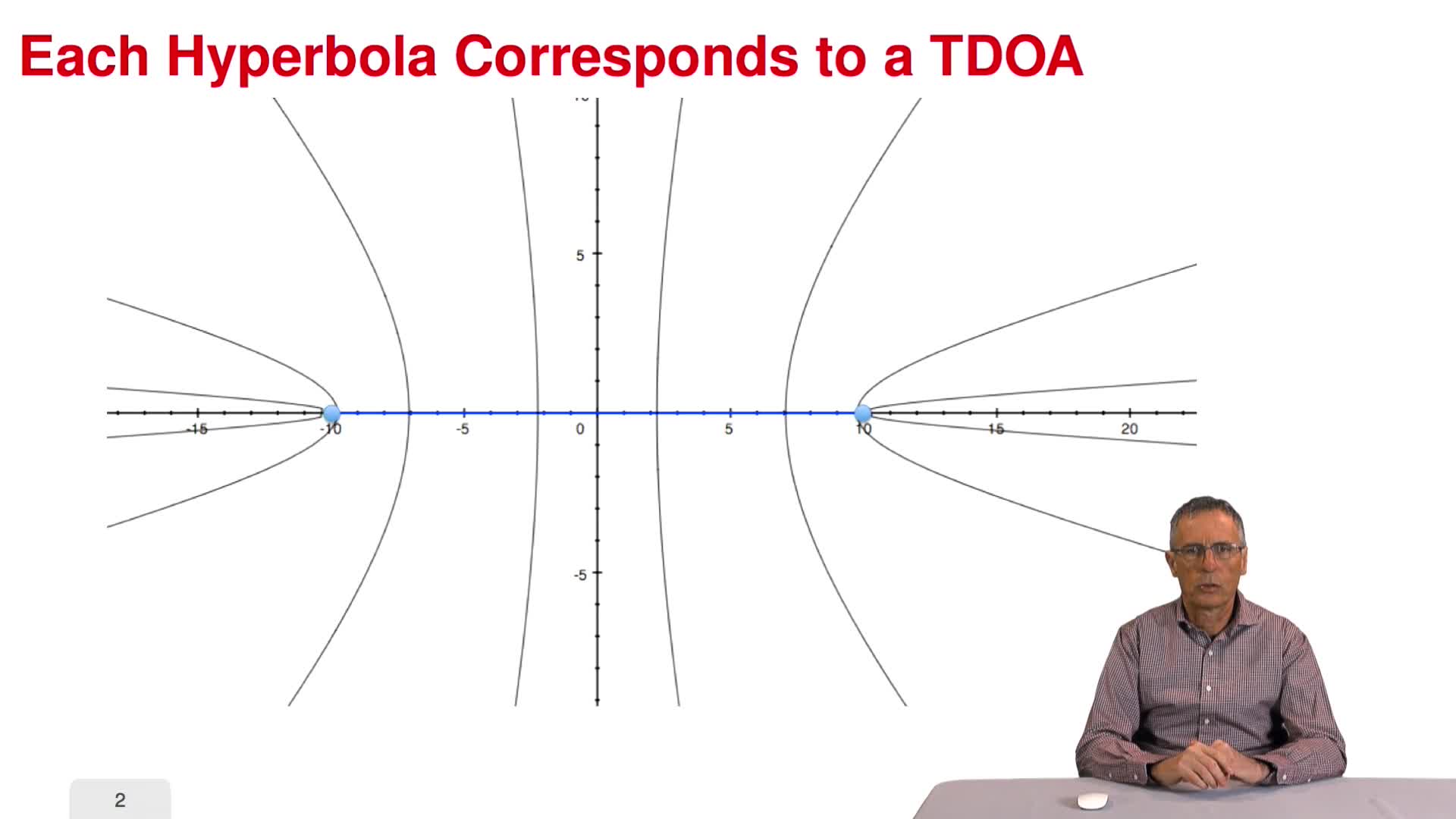
The geometry of two microphones
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
Direction of arrival
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
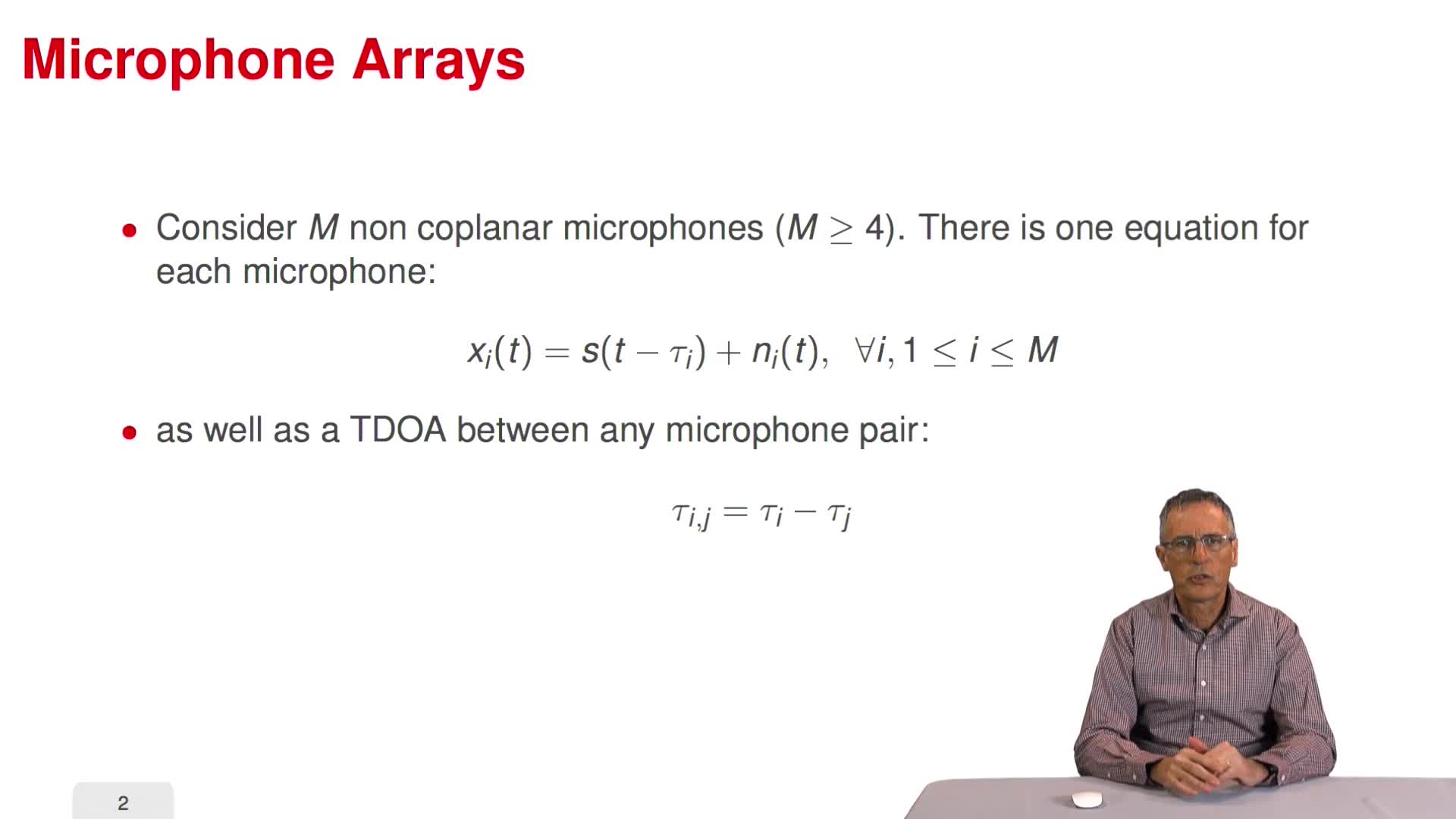
Using more than two microphones
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
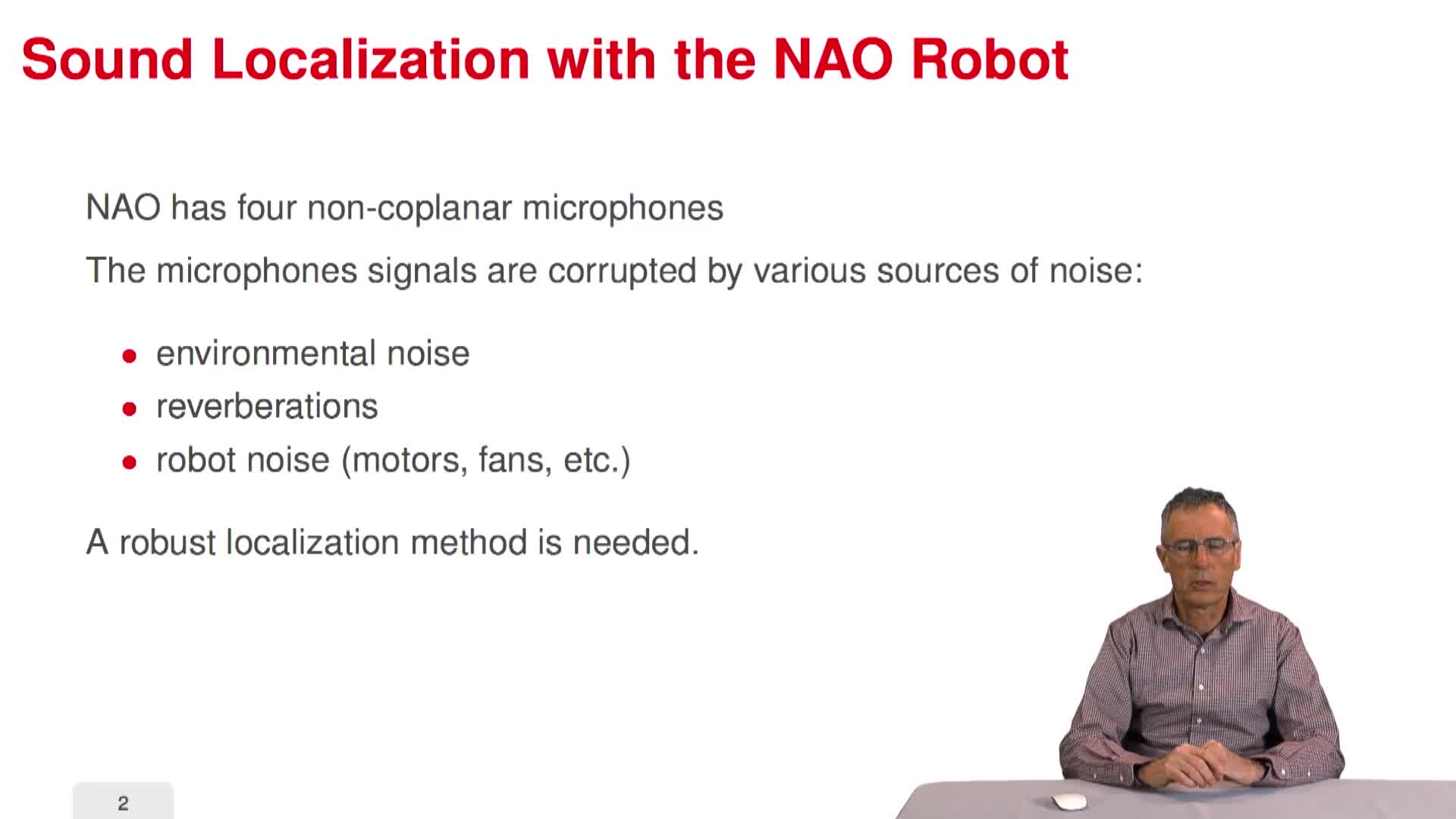
Embedding the microphones in a robot head
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
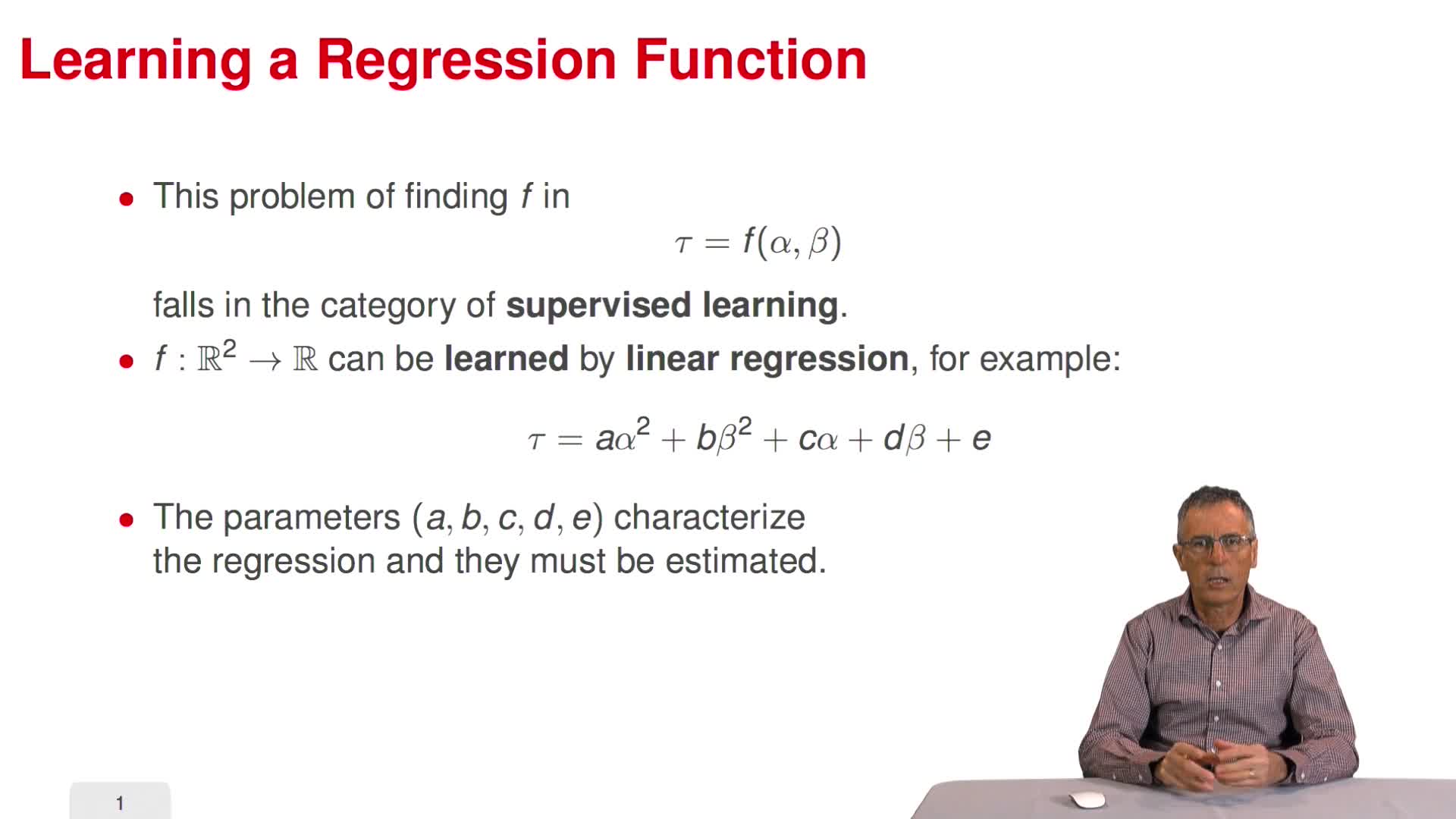
Learning a sound propagation model
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
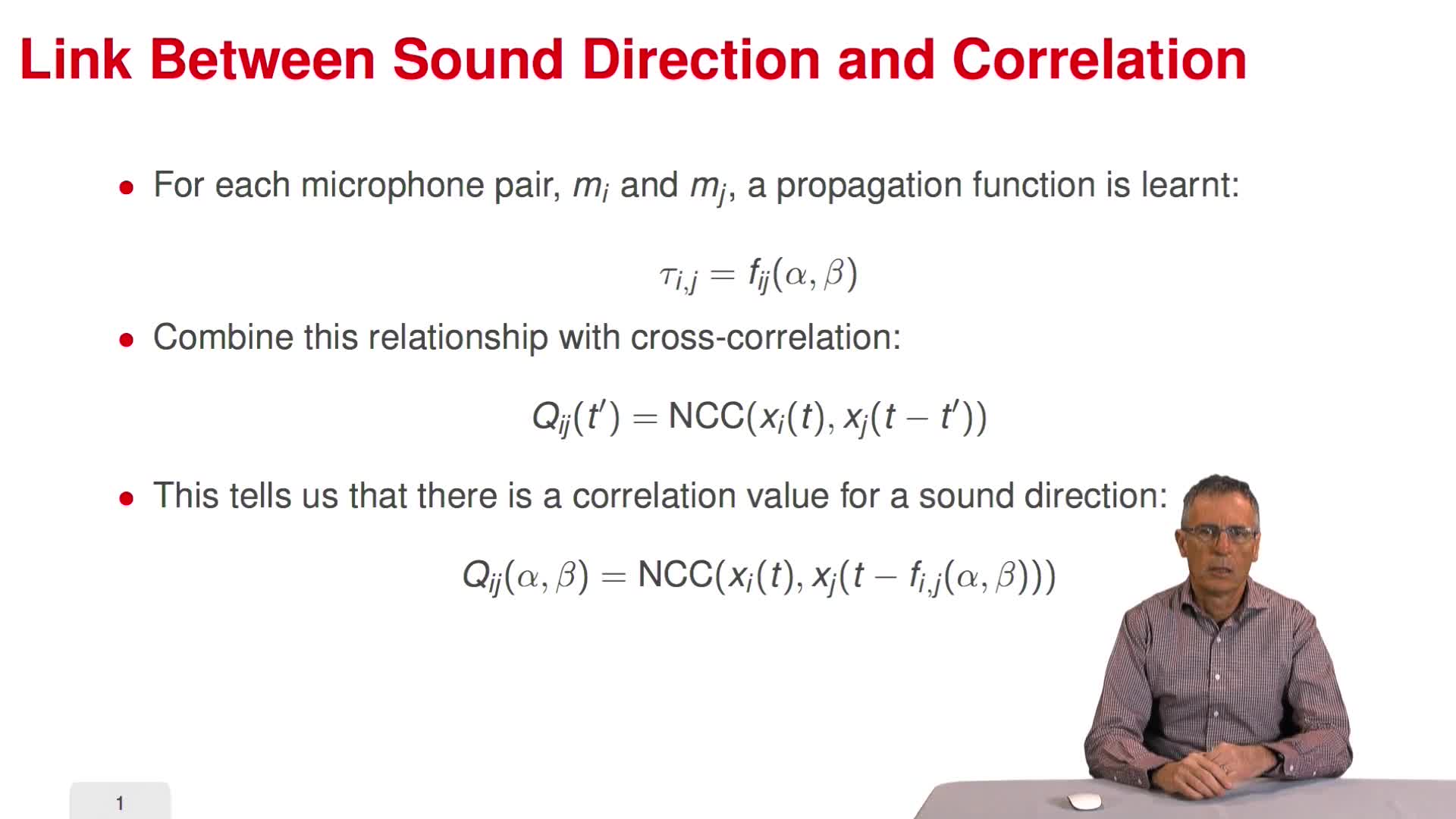
Predicting direction of a sound with a robot head
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
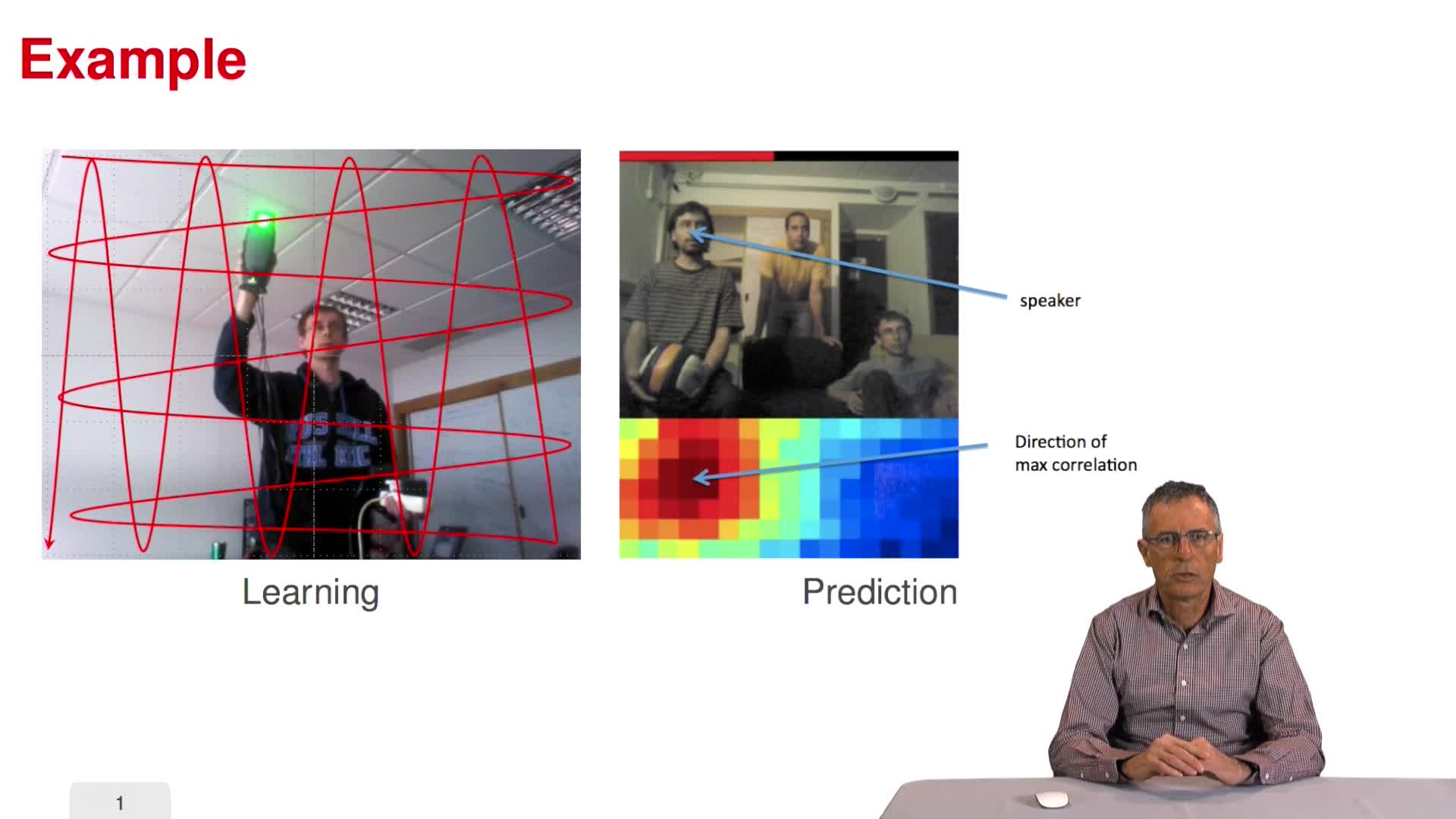
Example of sound direction estimation
Part 3 : Sound-Source Localization 3.1. Time difference of arrival (TDOA) 3.2. Estimation of TDOA by cross-correlation 3.3. Estimation of TDOA in the spectral domain 3.4. The geometry of two
Intervenants et intervenantes

Auteur d'une thèse de docteur-ingénieur en automatique (Grenoble INPG, 1981). - Directeur de recherche au CNRS, puis à l'INRIA, Laboratoire d'informatique fondamentale et d'intelligence artificielle de l'Institut national polytechnique de Grenoble (en 1993). - Directeur de thèse à l'Université Joseph Fourier de Grenoble et à Grenoble INPG (-1990-1994-). - Consultant