Les capteurs THOË et TRACESENSE
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
Mon compte
Pas encore inscrit ?
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
Phillippe Gaussier est professeur à l'université de cergy-Pontoise où il dirige un groupe de neurocybernétique au sein de l’UMR CNRS 8051. Ses recherches utilisent les robots comme modèles et outils
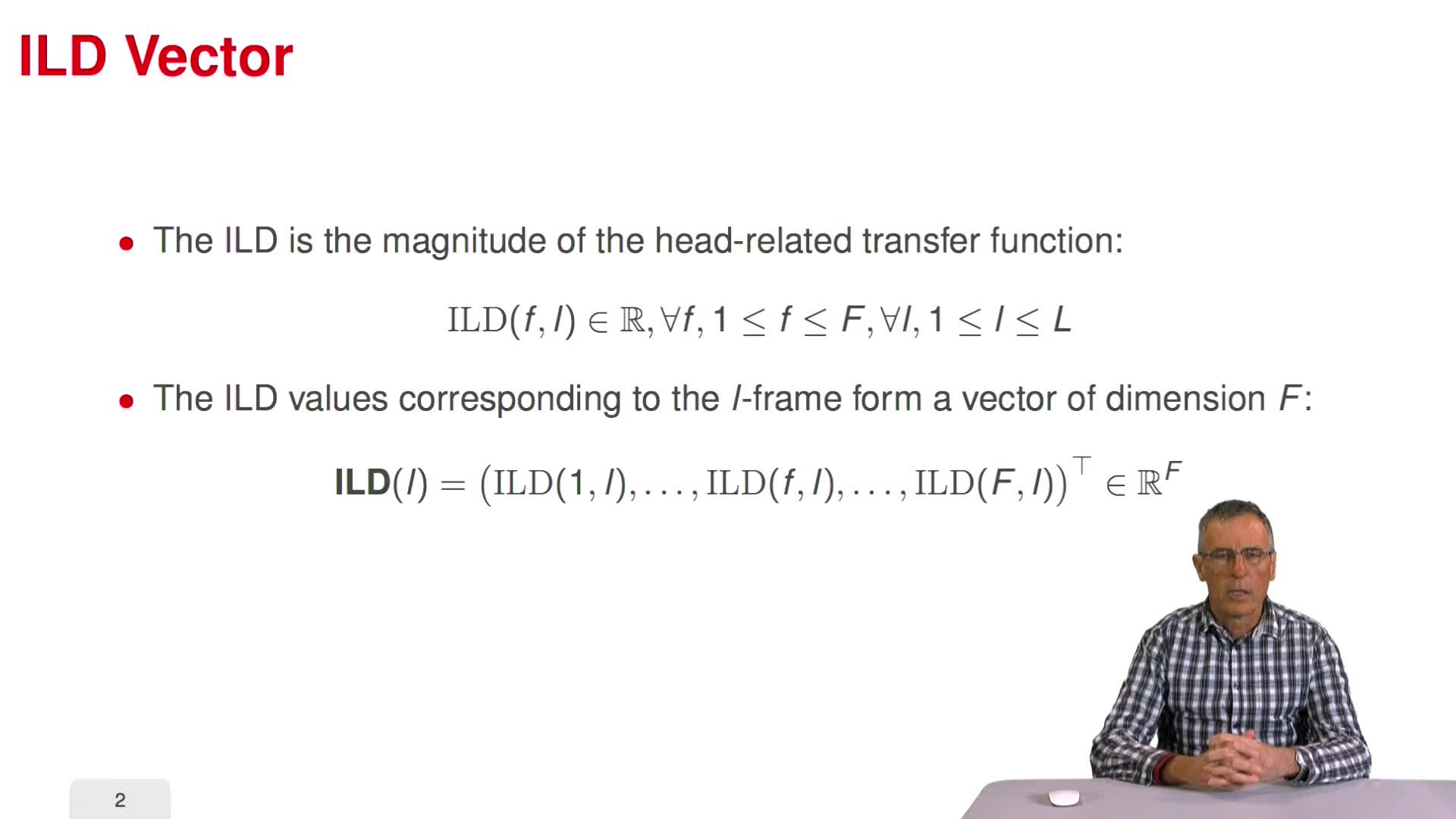
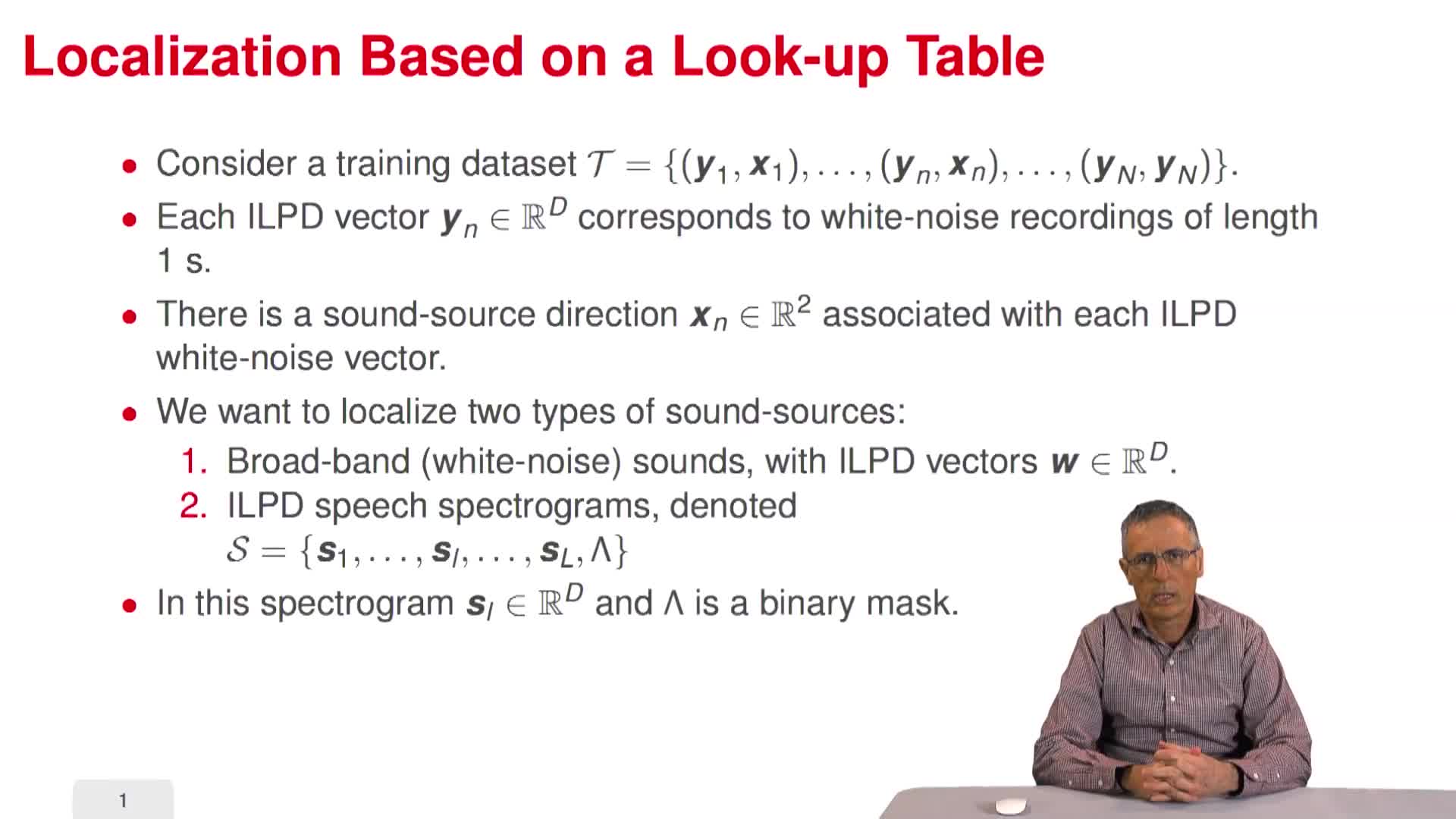
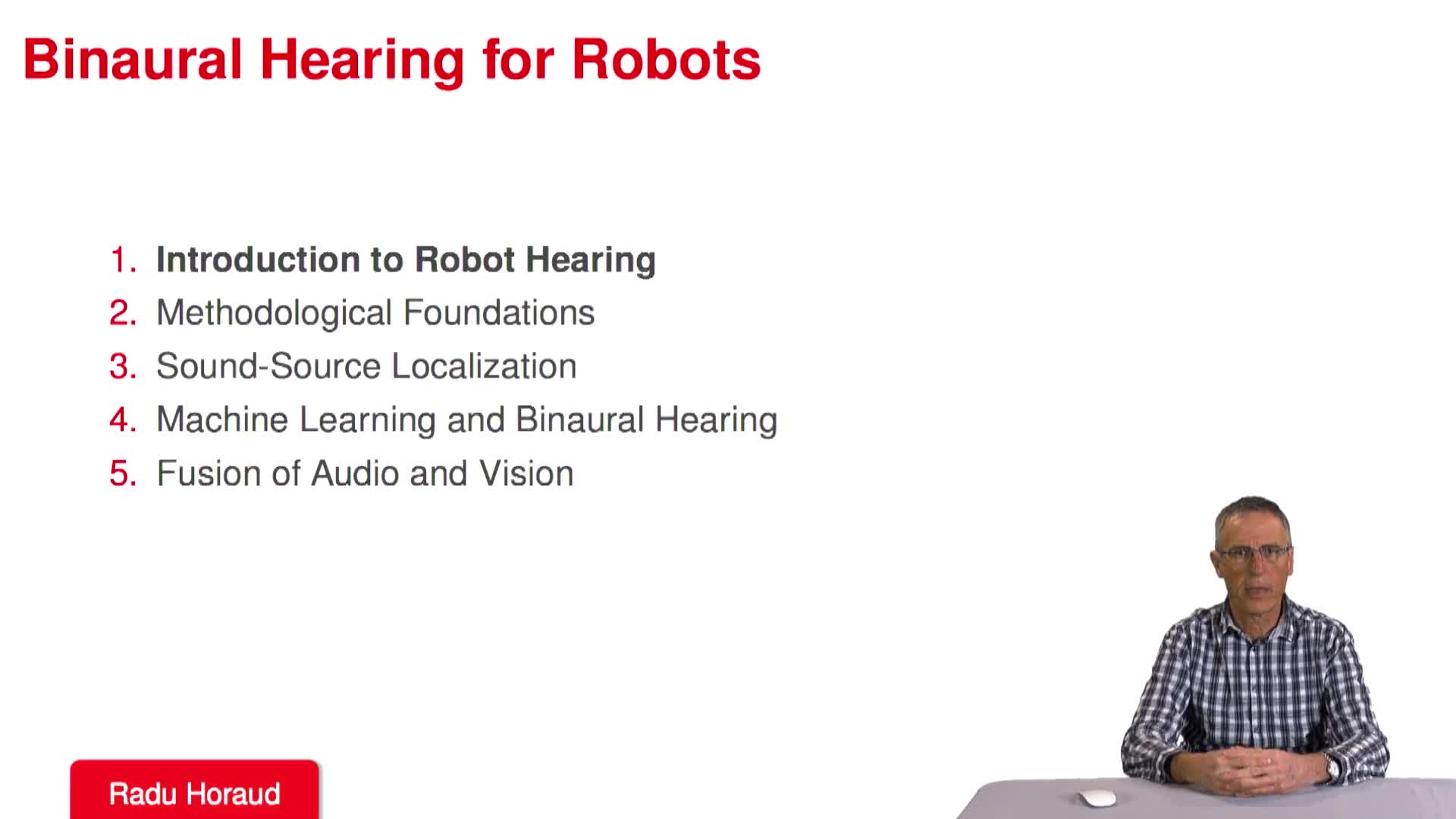
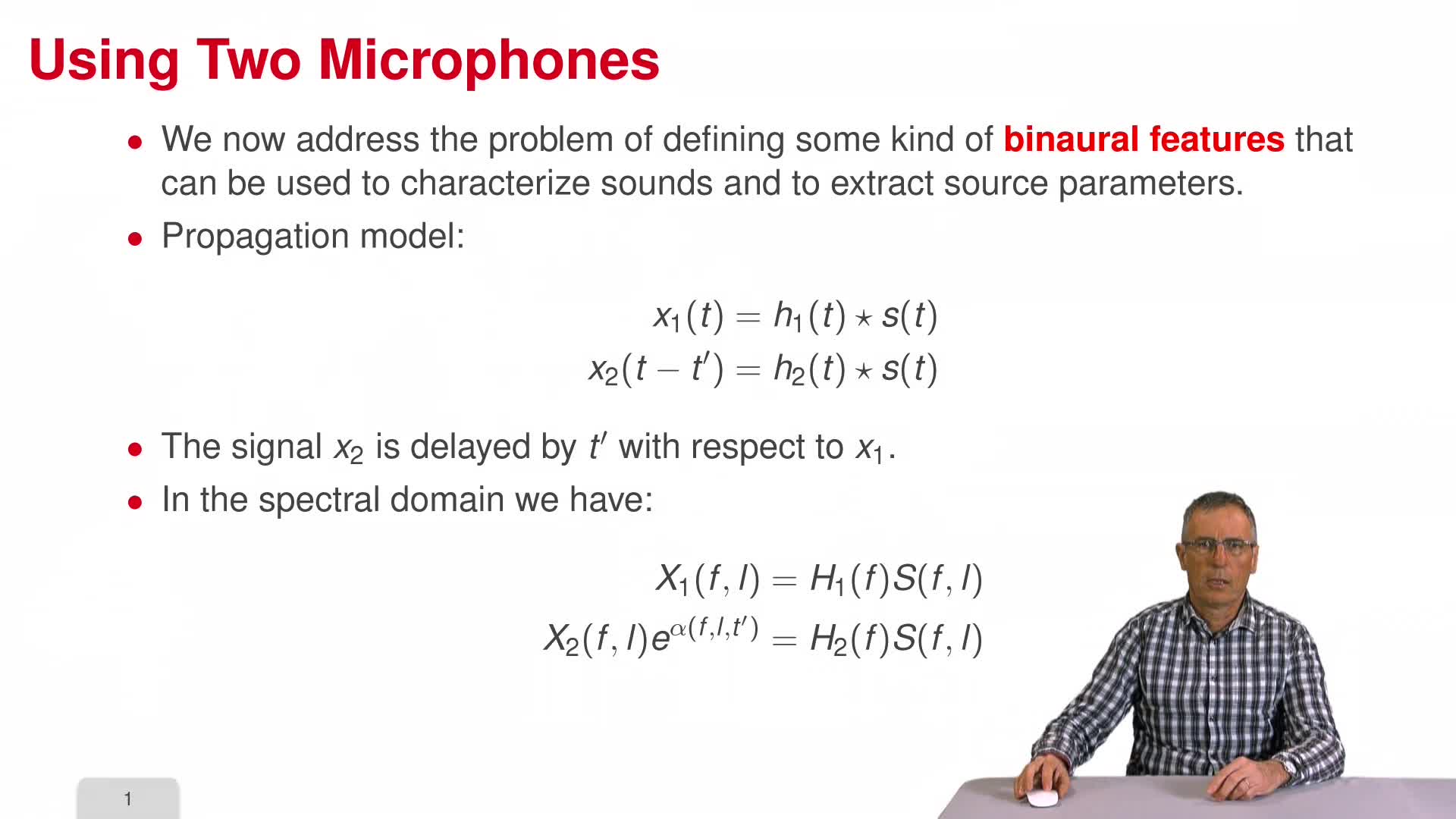
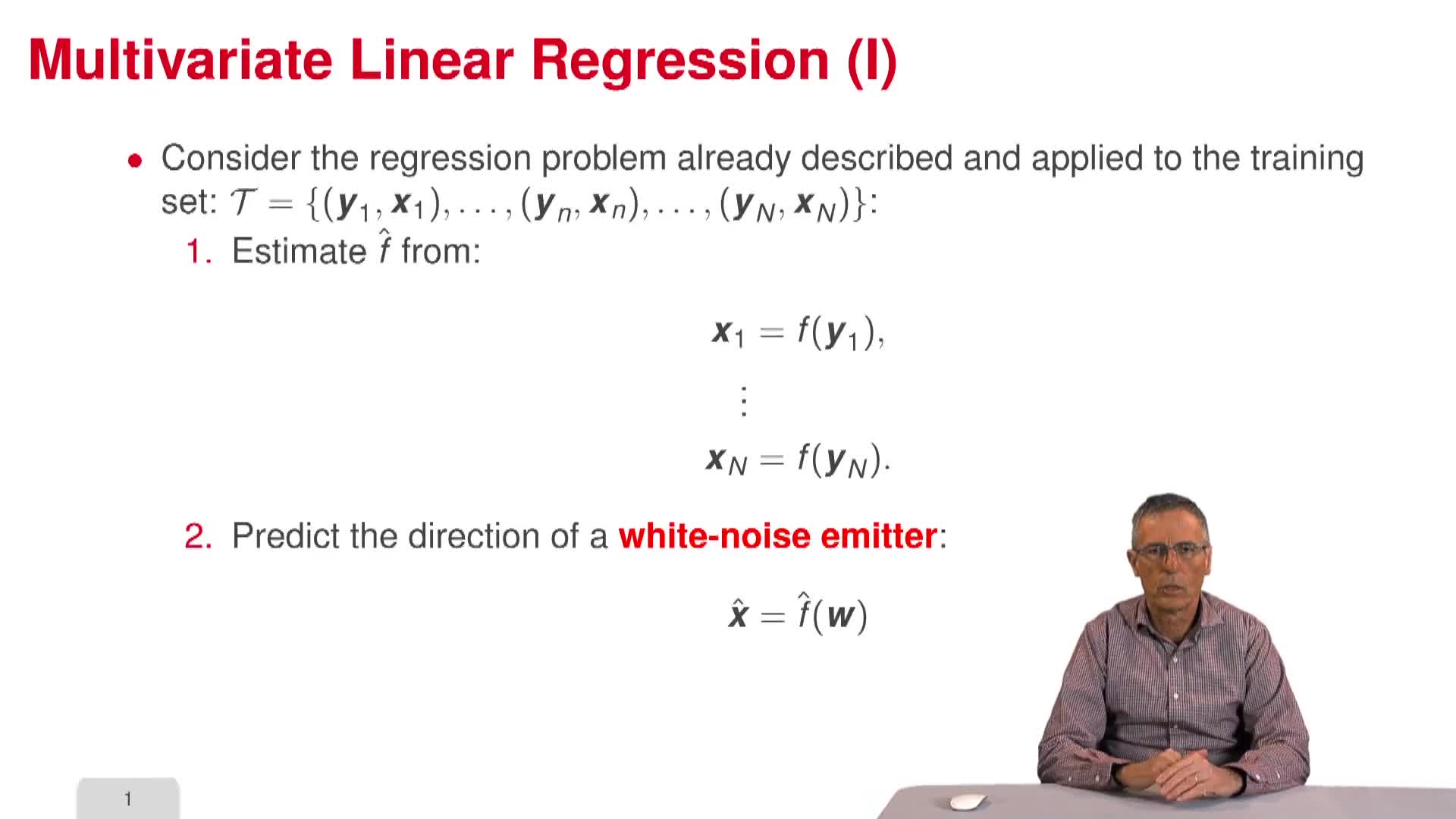
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Tout robot est une machine agissante. A ce titre, il va lui falloir se déplacer pour agir. L'objet de ce séminaire est d'étudier les principaux problèmes auxquels un robot est confronté dès lors
Part 2 : Methodological Foundations 2.1. Robot heads and acoustic laboratories 2.2. Binaural Processing Pipeline 2.3. Continuous-time Fourier transform 2.4. Continuous short-time
Dans cet exposé, nous nous intéressons à la notion de perception en environnement dits "intelligents" au sens large du terme.