Notice
Comment se déplacent les robots ? : 2ème partie
- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
Descriptif
Tout robot est une machine agissante. A ce titre, il va lui
falloir se déplacer pour agir. L'objet de ce séminaire est d'étudier
les principaux problèmes auxquels un robot est confronté dès lors qu'il
souhaite se déplacer de façon autonome dans un environnement quelconque.
Grâce à la collaboration d'un robot mobile autonome, nous illustrons les
problèmes suivants et montrons quelques unes des solutions qui ont été
proposées pour les résoudre:
- Cartographie de l'environnement.
- Localisation du robot dans son environnement.
- Planification de mouvement (i.e. le calcul du mouvement à réaliser
pour atteindre le but).
- Navigation (i.e. l'exécution du mouvement planifié).
Intervention / Responsable scientifique

Avec les mêmes intervenants et intervenantes
-
Comment se déplacent les robots ? : 1ère partie
FraichardThierryTout robot est une machine agissante. A ce titre, il va lui falloir se déplacer pour agir. L'objet de ce séminaire est d'étudier les principaux problèmes auxquels un robot est confronté dès lors
Sur le même thème
-
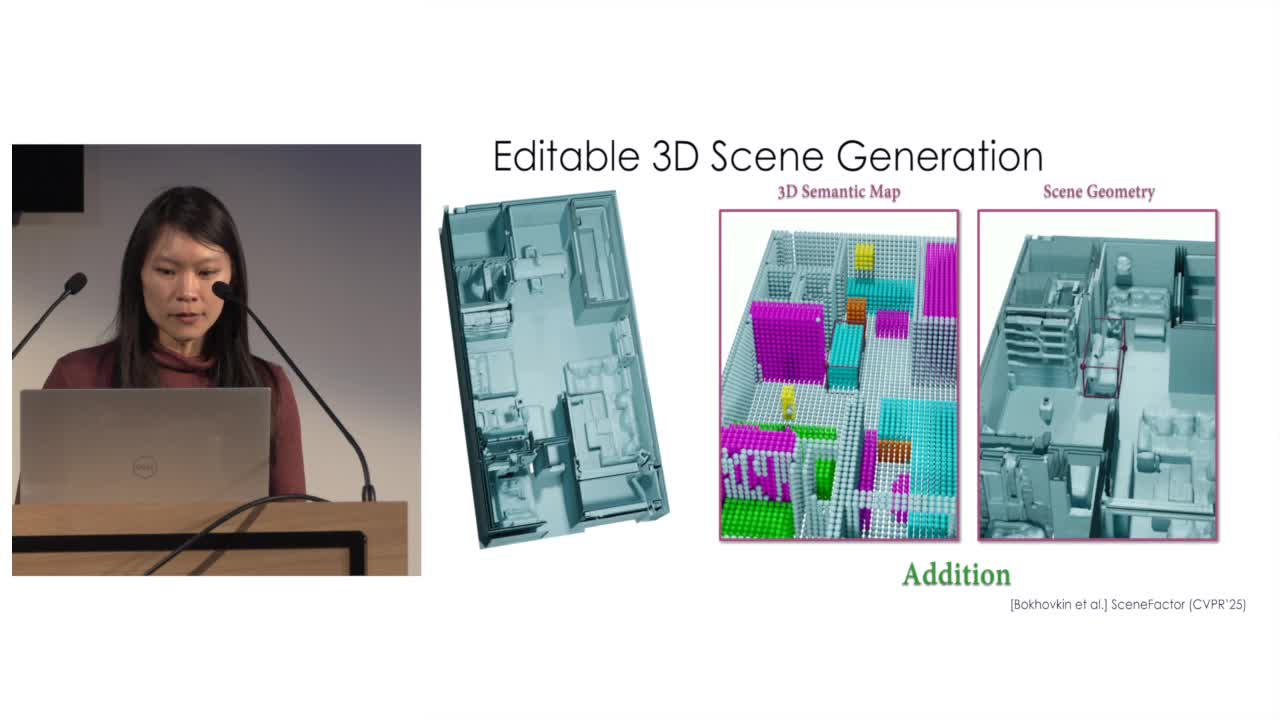
Angela Dai – 3D in a Large-Data World
DaiAngelaRecent advances in machine learning have shown remarkable progress in the 2D and video domain, fueled by very large-scale data and compute. 3D, however, which is critical for applications spanning
-
Rencontre avec Julie Everaert, artiste plasticienne
EveraertJulieJulie Everaert est artiste plasticienne, et mène des recherches en arts et sciences au laboratoire d’hydrodynamique de l’école Polytechnique
-
Spiking Control Systems
SepulchreRodolpheSpikes and rhythms organize control and communication in the animal world, in contrast to the bits and clocks of digital technology. As continuous-time signals that can be counted, spikes have a mixed
-
Une minute avec Lucas Joseph
JosephLucasLucas Joseph est ingénieur de recherche au sein du service Expérimentation et développement (SED) du centre Inria de l’université de Bordeaux.
-
Les capteurs THOË et TRACESENSE
Présentation de THOË le robot sous-marin et de TRACESENSE un capteur vibrant de préconcentration
-
Présentatition Rob'Autisme
SakkaSophieSophie Sakka Directrice du GRHAPES : Présentatition Rob'Autisme
-
Une minute avec Vincent Padois
PadoisVincentVincent Padois est directeur de recherche au sein de l’équipe-projet Auctus du centre Inria de l’université de Bordeaux. Il consacre ses travaux de recherche au développement d’algorithmes de contrôle
-
Le Creativ’Lab, au cœur de la robotique et de l’intelligence artificielle (ASR N°18 - LORIA)
HénaffPatrickLefebvreSylvainLe LORIA, laboratoire phare de la Grande Région dans le domaine de l’informatique, propose de rendre la recherche plus ouverte, plus collaborative, plus ambitieuse… en un mot, plus créative, à travers
-
Les jeudis du Grhapes 2021/2022-Handicap, Éducation et Numérique "La télé-présence mobile au servic…
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
-
Les jeudis du Grhapes 2021/2022-Handicap, Éducation et Numérique "La télé-présence mobile au servic…
La télé-présence mobile au service des enfants malades et empêchés de se rendre en classe Intervenants : Laurent Gallon et Françoise Dubergey
-
Journée Autisme et outils numériques Les outils numériques sont-ils plus adaptés que les outils tra…
Les outils numériques sont-ils plus adaptés que les outils traditionnels pour développer les compétences adaptatives et socio-communicatives d’enfants avec TSA ? Une étude écologique et longitudinale.
-
Journée Autisme et outils numériques Carole Saleur, enseignante Université de Lorraine
Développer des compétences en littératie et numérative émergentes avec une tablette numérique auprès d'élèves porteurs de troubles de l'autisme. Par Carole Saleur, enseignante, doctorante laboratoire