Chapitres
- Présentation02'10"
- Introduction04'48"
- Les animats08'10"
- L'organisation des animats08'19"
- L'apprentissage des robots09'23"
- Vers un rat artificiel03'11"
- Les processus biomimétiques de développement et d'évolution14'59"
- Les biobots04'30"
- Conclusion02'35"
- Questions15'27"
Notice
Les animats
- document 1 document 2 document 3
- niveau 1 niveau 2 niveau 3
Descriptif
Contrairement aux ambitions affichées aux origines de la discipline, en 1956, les recherches en intelligence artificielle ont à ce jour largement échoué à reproduire l'intelligence de l'homme, même si un programme d'ordinateur a réussi à battre le champion du monde aux échecs. Quant aux robots modernes, ils ne brillent pas non plus par leur intelligence, même si certaines machines caniformes ou humanoïdes sont de véritables merveilles de technologie. De nombreux chercheurs estiment qu'il est largement prématuré d'espérer reproduire directement l'intelligence de l'homme tant qu'on n'aura pas compris comment elle s'est mise en place au cours de l'évolution. Aussi, dans le but de rechercher en quoi l'intelligence humaine s'explique à partir des processus adaptatifs les plus simples hérités des animaux - et plutôt que de viser directement à comprendre et à reproduire les performances les plus élaborées dont est capable le cerveau - ces chercheurs visent d'abord à synthétiser des animats, c'est-à-dire des animaux artificiels ou des robots réels dont les lois de fonctionnement sont aussi inspirées de la biologie que possible. L'objectif est d'attribuer à ces animats certaines des capacités d'autonomie et d'adaptation basiques qui caractérisent les animaux réels, de façon à leur permettre de "survivre" ou d'assurer leur mission dans des environnements plus ou moins imprévisibles et dangereux. Cette conférence évoquera quelques automates célèbres - du pigeon d'Archytas de Tarente au canard de Vaucanson, en passant par l'androïde de Léonard de Vinci - pour rappeler que la conception de machines inspirées du vivant a été de tout temps une préoccupation humaine. La structure générale d'un animat et son mode de fonctionnement seront ensuite décrits. Ils se caractérisent par le fait que l'animat acquiert des comportements efficaces par interaction étroite avec son environnement, grâce à son architecture de contrôle - équivalent du système nerveux d'un animal - reliant ses capteurs - équivalents des récepteurs sensoriels- à ses actionneurs - équivalents des organes moteurs. Puis divers exemples illustreront la façon dont les animats peuvent eux-mêmes améliorer ou se constituer une architecture de contrôle ou une morphologie adaptées, par des processus inspirés de la biologie comme le développement, l'apprentissage ou l'évolution des espèces. Enfin, à partir notamment de l'évocation des "biobots" - robots hybrides constitués à la fois d'éléments artificiels et d'éléments vivants - les avantages et les risques liés à ces recherches seront discutés.
Intervention / Responsable scientifique

Thème
Documentation
Liens
La Web TV de l'enseignement superieur
Université René Descartes Paris-5Partenaire de l'université de tous les savoirs 2001-2002 Accueil dans ses locaux les conférences
Dans la même collection
-
Cerveau, chance et chaos
KornHenriLes neurosciences vivent une période nouvelle et particulièrement fructueuse dans leurs rapports avec la physique et les mathématiques. En neurobiologie, ainsi que dans d'autres corpus du savoir, a
-
La manipulation et l'étude de molécules uniques
BensimonDavidPas de résumé disponible pour cette conférence
-
Les oiseaux face aux contraintes énergétiques
Le MahoYvonLes oiseaux peuplent la plus grande partie de notre planète, du milieu des océans aux déserts et aux régions polaires. Alors que certaines espèces font face aux conditions les plus rudes, comme les
-
Vers des virus artificiels
BehrJean-PaulLe potentiel thérapeutique des oligonucléotides et des gènes a été amplement démontré sur des systèmes modèles. Malheureusement, les développements cliniques se heurtent encore à des problèmes de
-
Les courbes planes aléatoires
WernerWendelinUne des questions fondamentales en théorie des probabilités ainsi qu'en physique statistique est de comprendre le comportement macroscopique "typique" d'un système formé de nombreuses composantes
-
La modélisation mathématique des langues naturelles
KahaneSylvainL'objet central de la linguistique contemporaine est de modéliser les langues naturelles et leur fonctionnement, c'est-à-dire comment un locuteur exprime un sens dans une langue donnée ou comment à
-
Le droit au miroir de la littérature
OstFrançoisLe courant "droit et littérature", très développé aux Etats-Unis, est encore embryonnaire dans les pays de langue française. Fruit de la collaboration de juristes, de philosophes et de littéraires, ce
-
Approche philosophique de l'administration européenne
DewandreNicoleCette conférence devrait être une invitation à penser autrement l'action politique et administrative. Elle proposera un déplacement par rapport à l'idéalisation et à son corollaire, l'indignation.
-
Une approche géographique des images de l'art occidental
GrisonLaurentNotre travail unit un métier - celui de chercheur - et une double passion, celle de l'art et celle de la géographie. En mettant soigneusement les choses les unes à côté des autres, les unes avec les
-
Colloïdes et biotechnologies
BibetteJérômeL'exposé introduit lutilisation des colloïdes dans le domaine du diagnostic biologique. Nous introduirons les bases de la physico chimie des colloïdes ainsi que les approches classiques du diagnostic
-
Approche multidisciplinaire de la pollution par les nitrates
MariottiAndréLes préoccupations environnementales sont, légitimement, très souvent présentées à l'échelle planétaire : gaz à effet de serre et climatologie, trou d'ozone etc. Les scientifiques en charge de l'étude
-
Émotion et rationalités en sciences sociales
LivetPierreLes sciences sociales, et surtout celles qui tentent une reconstruction rationnelle des interactions des acteurs (l'économie, un certain type de sociologie) ont longtemps considéré le rôle des



Sur le même thème
-
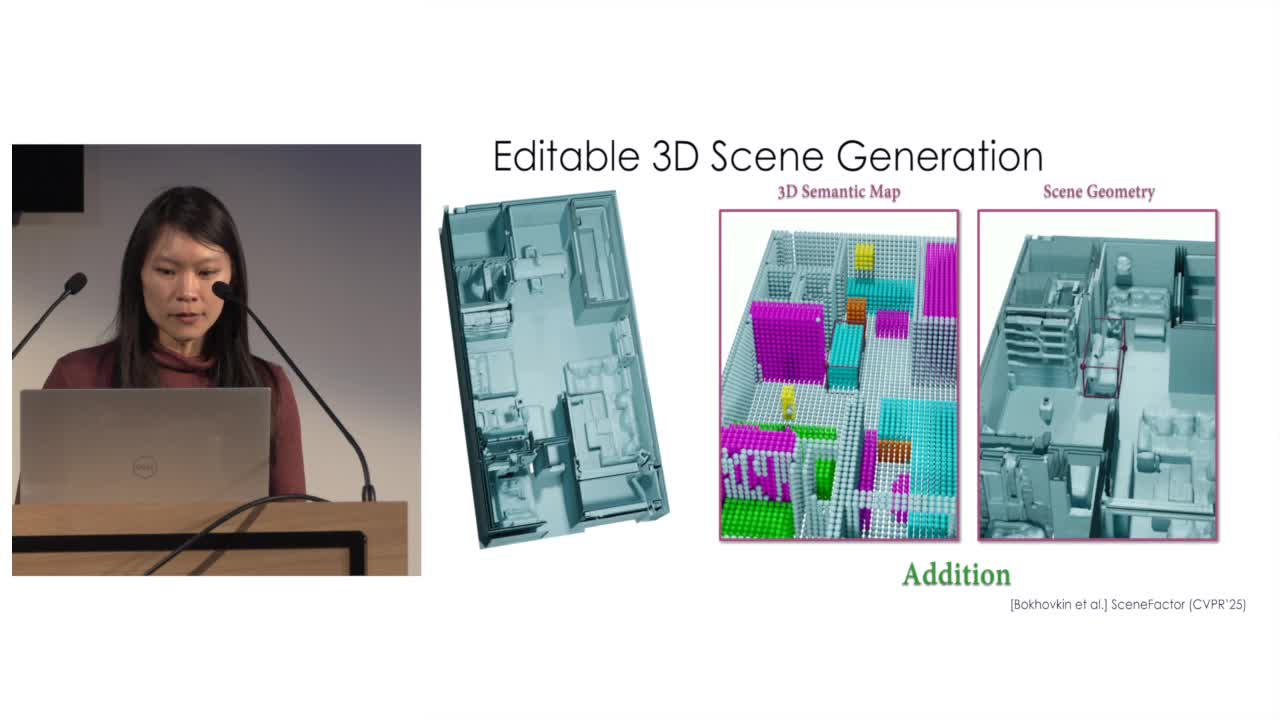
Angela Dai – 3D in a Large-Data World
DaiAngelaRecent advances in machine learning have shown remarkable progress in the 2D and video domain, fueled by very large-scale data and compute. 3D, however, which is critical for applications spanning
-
Rencontre avec Julie Everaert, artiste plasticienne
EveraertJulieJulie Everaert est artiste plasticienne, et mène des recherches en arts et sciences au laboratoire d’hydrodynamique de l’école Polytechnique
-
Spiking Control Systems
SepulchreRodolpheSpikes and rhythms organize control and communication in the animal world, in contrast to the bits and clocks of digital technology. As continuous-time signals that can be counted, spikes have a mixed
-
Une minute avec Lucas Joseph
JosephLucasLucas Joseph est ingénieur de recherche au sein du service Expérimentation et développement (SED) du centre Inria de l’université de Bordeaux.
-
Présentatition Rob'Autisme
SakkaSophieSophie Sakka Directrice du GRHAPES : Présentatition Rob'Autisme
-
Une minute avec Vincent Padois
PadoisVincentVincent Padois est directeur de recherche au sein de l’équipe-projet Auctus du centre Inria de l’université de Bordeaux. Il consacre ses travaux de recherche au développement d’algorithmes de contrôle
-
Le Creativ’Lab, au cœur de la robotique et de l’intelligence artificielle (ASR N°18 - LORIA)
HénaffPatrickLefebvreSylvainLe LORIA, laboratoire phare de la Grande Région dans le domaine de l’informatique, propose de rendre la recherche plus ouverte, plus collaborative, plus ambitieuse… en un mot, plus créative, à travers
-
Journée Autisme et outils numériques Les outils numériques sont-ils plus adaptés que les outils tra…
Les outils numériques sont-ils plus adaptés que les outils traditionnels pour développer les compétences adaptatives et socio-communicatives d’enfants avec TSA ? Une étude écologique et longitudinale.
-
Journée Autisme et outils numériques Carole Saleur, enseignante Université de Lorraine
Développer des compétences en littératie et numérative émergentes avec une tablette numérique auprès d'élèves porteurs de troubles de l'autisme. Par Carole Saleur, enseignante, doctorante laboratoire
-
Pauline Chevalier, docteure, Institut italien de technologie (IIT), Gênes
Aborder les sensibilités sensorielles au sein des troubles du spectre de l'autisme lors d'interaction avec un robot social
-
RobotY'c Épisode 3 "Le challenge"
Le Challenge RobotY’c, créé par Yvelines Numériques à destination des collégiens du département, s’est ouvert à la rentrée 2017 aux dispositifs Ulis-collège des Yvelines. Il s’agit de construire un
-
RobotY'c Épisode 2 "Un chemin semé d'embuches"
Le Challenge RobotY’c, créé par Yvelines Numériques à destination des collégiens du département, s’est ouvert à la rentrée 2017 aux dispositifs Ulis-collège des Yvelines. Il s’agit de construire un